행성 탐사용 로버 소개 및 기술 발전 전략
<목차>
0. 요약
1. 행성 탐사용 로버에 대한 개괄
2. 로버 개발의 필요성
3. 국내 로버 기술 수준 국내 로버 기술 수준 분석 분석 및 발전 전략
4. 맺음말
출처 및 참고자료
0. 요약
본고에서는 행성 탐사용 로버에 대해 소개하고 성공적인 임무 수행을 위한 기술 개발 방향을 소개한다. 행성 탐사용 로버는 지구 외 우주 행성에서의 지질, 자원 및 과학적 탐사를 목적으로 개발되었으며, 임무 환경에 대응하여 특수 제작된 탐사 모빌리티를 의미한다. 지금도 지구 외부의 위성이나 행성에 대한 연구가 꾸준히 진행되고 있으며, 무인 탐사선에 의해 사전 연구가 이루어진 후 심층적 조사와 연구의 필요성에 의해 무인 로버를 이용한 탐사가 이루어지게 된다. 달과 화성에서 로버를 통한 연구가 이루어진 사례가 있으며, 탐사 임무지의 환경 및 지구와의 먼 거리를 극복하기 위해 다양한 기술과 탐사 장비가 적용된다. 로버는 전체적인 작동 제어를 위한 컴퓨터 및 센서류, 태양열 패널 등의 파워 시스템, 주요 부품의 보호를 위한 열제어 장치 및 구조체, 임무 수행을 위한 탑재체, 이동과 작업을 위한 구동부, 지구나 기지와의 통신 장치 등으로 구성된다. 이 모든 장치의 질량은 발사체와 임무 및 생존 수준을 고려하여 설계 단계에서 엄격하게 관리된다. 현재 미국 주도로 국제 달 탐사 미션인 ‘아르테미스 프로그램(Artemis Program)’이 진행되고 있으며, 거주 가능한 달 기지 건설과 심우주 탐사를 위한 우주정거장 건설을 목표로 하고 있다. 유인 거주 달기지 건설을 위해 물 탐사가 매우 중요하며, 기지 부지에 대한 위치 선정 등에 있어서 무인 탐사 로버가 그 역할을 수행할 것으로 기대하고 있다. 향후 기지 건설 후 자원 탐사 및 채취에서도 로버가 큰 역할을 할 것으로 예상된다. 현재 달과 화성에 보낸 로버에 적용된 기술과 부품은 기존 우주 개발에 참여하여 노하우를 쌓은 소수의 전문기업만 보유하고 있어 향후 다가오는 미래 우주 탐사 분야 시장에 대비할 필요가 있다. 특히 로버용 액추에이터 기술 분야는 로버 외에 우주용 로봇 및 기타 극한 환경용 모빌리티에 파생 기술의 적용이 가능하므로 가치가 크다고 할 수 있다.
1. 행성 탐사용 로버에 대한 개괄
1) 로버 기술의 개념
행성 탐사용 로버는 지구 외 우주 행성에서의 지질, 자원 및 과학적 탐사를 목적으로 개발되었으며, 임무 환경에 대응하여 특수 제작된 탐사 모빌리티를 의미한다. 탐사지의 환경과 임무 내용 및 수행 기간에 따라 다양한 형상으로 개발되고 있다. 차체를 중심으로 구동을 위한 휠, 주변 환경 검출을 위한 센서, 통신용 안테나, 전력 생산을 위한 태양열판, 과학 탐사 장비가 장착된 형상이 주를 이루며, 험지에서의 임무 조건에 최적화된 형상으로 설계한다.
2) 탐사환경
지구에서 가장 가까우면서도 탐사가 집중되고 있는 달의 경우 표면의 일조(lighting) 조건은 극점을 제외한 모든 지역이 약 2주(14일)씩 주간과 야간이 반복된다. 또 달표면의 온도는 주간에는 최대 130℃까지 오르고 야간에는 최저 영하 230℃까지 하락하기 때문에 착륙선(Lander)과 로버의 생존성 확보가 요구된다. 달 극점의 경우, 일부 충돌 분화구 바닥과 벽은 영구적인 그림자 지역이기 때문에 태양광 노출 지역이 매우 제한적이다. 북극에서는 연중 89%, 남극에서는 연중 86%의 기간에 태양광이 지속될 수 있다고 보고된 바 있지만, 해당 구역조차 달 표면의 열적 환경은 주야간에 걸쳐 약 40~–60℃ 수준의 극심한 저온 환경으로 알려져 있다.

달 표면 전역은 미소 운석이나 운석 충돌에 의해 생성된 regolith라고 불리는 고운 가루 같은 표토(表⼟)로 덮여 있다. 젊은 바다(younger mare) 영역에서는 regolith가 4~5m 깊이로 쌓여 있고, 오래된 고지(highland) 영역에서는 10~15m 정도 쌓여 있는 것으로 추정된다. 표토 일부는 자성을 띠고 있어 대전되기 쉬우며, 먼지의 형태로 탐사용 로버/로봇 표면에 달라붙어 열제어·구동 성능에 영향을 준다. 장기간 임무 시에는 먼지가 구동 액추에이터의 베어링 표면에 축적되는 것을 방지하기 위해 극성화된 표면이나 극성 코팅에 대한 연구가 필요하다.

화성의 경우 기온은 110~35℃로 평균 60℃ 수준이다. 대기는 이산화탄소, 질소 및 아르곤가스로 구성되어 있고 지구보다 약 100배 이상 얇아 액체 상태의 물이 장시간 존재하기 어려우며, 표면 아래에서 물이나 얼음 형태로 관측된다. 화성은 상당히 활동적이어서 땅 아래에서 지진이 발생하고 먼지 소용돌이가 지형을 휩쓸 뿐 아니라 대기에서는 권운이 형성되는 환경이다.

3) 로버 개발의 역사
최초의 행성 탐사용 로버는 구 소련의 루노호트(Lunokhod) 1호인데, 1970년 11월 루나 17호를 통해 달로 발사되었다. 루노호트 1호는 지구 바깥의 천체에서 성공적으로 작동한 최초의 로버였으며, 약 3개월의 설계 수명을 넘어 321일간 10.54km를 이동하며 활동했다. 루노호트 로버는 독립적으로 구동되는 8개의 바퀴에 뚜껑이 달린 욕조 모양의 차체로 설계되었다. 달에서 낮에는 욕조 뚜껑 모양의 태양전지판을 사용하여 배터리를 충전하고, 밤에는 뚜껑을 닫고 폴로늄–210 방사선 동위원소 히터를 이용하여 내부 구성 요소를 보호하는 방식으로 운용하였다.

두 번째로 개발된 무인 탐사 로버는 미국 NASA의 소저너(Sojourner)이며, 1997년 Mars Pathfinder mission을 통해 화성으로 발사되었다. 소저너는 6개의 바퀴가 달린 17.5kg(로버 11.5kg, 장비 6kg)의 작은 로버이다. NASA의 연구실에서 제작된 기술적 결과물을 실제 화성 환경에서 테스트하는 것이 주 임무 이며, 여기서 얻어진 결과물을 토대로 후속 탐사 로버를 개발했다. 빠르고 저렴하게 개발하는 것을 목표로 1996년 개발 당시 기준으로 약 2,500만 달러(당시 환율 기준 한화 약 200억 원, 현재 가치로 약 425억 원)의 개발비와 3년이 소요된 것으로 알려져 있다.

소저너에는 거친 지형에서도 안정적인 거동이 가능하도록 고안된 ‘로커–보기(Rocker– Bogie)’라 불리는 현가장치를 적용하여 6개의 바퀴가 모두 지면과 접촉하도록 설계했으며, 화성 환경에 적합한 것으로 밝혀져 후속 모델에도 계속 적용되었다. 전후면에 카메라와 여러 과학 장비들이 장착되었으며, 7 화성일 동안 임무 수행이 가능하도록 설계되었으나 85 화성일 동안 작동하였다. 총 주행거리는 100미터를 조금 넘게 이동했다.

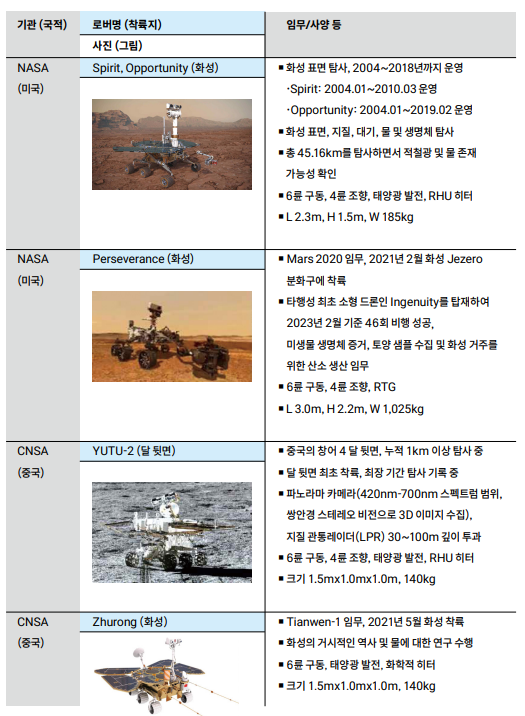
이후 NASA 주도로 화성 무인 탐사를 위한 로버 개발이 주를 이루었다. 2010년대 후반 중국의 연이은 달과 화성 탐사 로버의 발사와 성공으로, 현재 행성 탐사용 로버 기술은 미국, 러시아, 중국이 상당 부분을 보유하고 있는 것으로 판단된다. 현재까지는 과학 탐사를 목적으로 발사되었으나, 다시 시작되는 인간의 거주를 목적으로 한 달과 화성 탐사는 물 자원이 있을 것으로 예상되는 지점에 집중적인 탐사를 할 예정이다. 물 자원의 예상 위치는 달 극지나 화성의 지표 아래층이며, 향후 보다 어려운 조건에서의 탐사가 예상된다. 표 1에서는 현재까지 성공적으로 달과 화성으로 발사된 로버를 열거했다.

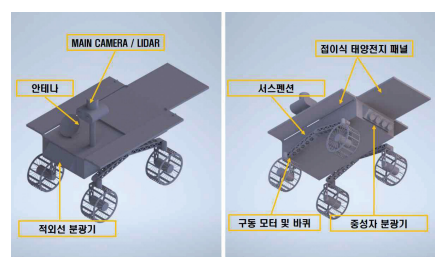
프라그얀은 2023년 8월에 달의 남극에 착륙한 착륙선 비크람(Vikram)에 탑재된 탐사 로버이다. 26kg의 소형 로버로서 150℃ 이하의 온도로 내려가는 달 남극의 밤 조건에서는 견디지 못하고 낮에만 활동하도록 설계되었다. 실제로 달의 밤이 지난 후 교신에 반응하지 않아 혹독한 밤의 조건을 견디지 못한 것으로 추정된다. 그림 8에 나타낸 바와 같이 탐사 로버에는 다양한 장치들이 탑재되며, 주요한 내용은 표 2와 같다.
4) 행성 탐사 로버의 구성
행성 탐사용 로버는 탐사지의 자연환경을 극복할 수 있는 구조로 개발하며, 주요 구성품은 인도에서 발사한 프라그얀(Pragyan)의 구조를 그림 8에서 예시로 살펴볼 수 있다. 프라그얀 로버는 각형 섀시 내부에 전자 부품과 파워 시스템 등 주요 부품을 내장하고 있고, 로커–보기 현가장치를 통해 구동부를 구현하고 카메라 및 기타 탐사용 탑재체들이 차체 외부에 장착된 구조임을 확인할 수 있다.


2. 로버 개발의 필요성
1) 국제 동향
우주에서 취득한 정보를 이용하여 직간접적으로 생활과 안전에 필요한 서비스를 제공하는 등 우주 관련 산업이 성장하고 있으며, 2040년까지 1조 1,000억 달러 규모로 성장할 것으로 예상된다. 급격한 성장의 저변에는 과거 국가가 주도하던 ‘스페이스’에서 민간이 주도하는 ‘뉴 스페이스’로의 패러다임 전환이 크게 영향을 끼치고 있다.


미국은 2015년 「상업우주발사 경쟁법」을 통해 우주 자원의 자유로운 탐사·소유·판매를 허용하기 시작했다. 룩셈부르크(2017년 9월)와 일본(2021년 6월)도 우주 자원 활용에 대한 법을 제정하여 우주 탐사 경쟁을 유도하고 있다. 우주 탐사 및 우주 자원 소유, 활용법 제정에 따른 민간 우주산업 성장 및 활성화 경쟁이 본격적으로 시작되었다고 할 수 있으며, 미국 주도로 아르테미스 계획(Artemis Program) 또는 아르테미스 조약(Artemis Accord)을 통하여 글로벌 달 탐사 협력체제가 이루어지고 있다. 아르테미스 계획은 21세기 미국의 달 탐사 계획으로, 거주를 위한 기지 건설과 달 궤도를 공전하는 정거장 건설을 포함하고 있다. 또한 2025년까지 달에 다시 유인 착륙하는 것을 목표로 하고 있다. 2024년 현재 미국을 포함한 39개국이 협정에 참여하였으며, 러시아와 중국은 참여하지 않고 독자적인 달 탐사를 수행하고 있다.

아르테미스 계획은 기존의 아폴로 계획에 비해 보다 깊이 있는 목표를 표방하고 있으며, 아래 표 3과 같이 크게 세 가지 목표로 구성된다
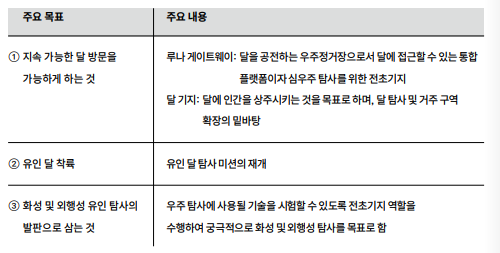


달 개발에 있어 유인 기지 건설을 위한 물 자원과 희귀 자원 탐사가 큰 비중을 차지하고 있다. 달 극지의 영구 음영지에 물 자원이 있을 것으로 추정하고 있어 기지 건설을 위한 사전 탐사가 필수적이다. 또한 헬륨–3(He–3)를 비롯한 희토류 광물의 존재가 알려져 있고, 희귀 자원을 선점하기 위한 탐사의 중요성이 대두되고 있어 탐사용 로버 기술이 매우 중요하다고 할 수 있다.
2) 국내 동향
정부는 2005년 「우주개발 진흥법」을 제정함으로써 우주 개발을 체계적으로 진흥하고 우주 물체를 효율적으로 이용ㆍ관리하여 우주 공간의 평화적 이용과 과학적 탐사를 촉진하고자 했다. 2022년 우주개발진흥실무위원회는 「우주개발 진흥법」을 기반으로 발사체, 우주 탐사, 위성 영역에 대한 시행 계획을 확정하였고, 7,340억 원을 투자하여 기술 역량을 확보하고자 했다. 이후 2023년 우주 경제 실현 가속화를 위해 민간 우주 발사 서비스 상용화를 위한 발사 허가 표준 절차를 마련하고, 차세대 발사체(누리호 3차) 개발 사업 추진 계획을 확정하고 8,742억 원을 투자하고 있다. 산업통상자원부 ‘민간주도 우주산업 소부장 발전 협의회’의 자료에 따르면 달과 소행성 등에 매장된 헬륨–3, 희토류 등 경제적 가치가 매우 큰 우주 자원 확보를 위한 선행기술 개발을 추진할 계획이다. 특히 달은 매장량 100만 톤 이상의 헬륨–3가 있고, 안테로스 소행성의 경우 희토류 등 5,000조 원 이상의 광물질이 매장되어 있음에 주목하고 있다. 산업통상자원부는 2017년 ‘대한민국 200대 중점 우주기술개발 로드맵’을 발표하여 미국 NASA, 유럽 ESA, 일본 JAXA의 10~15년 단위 우주 개발 기술 로드맵의 분석 결과를 토대로 향후 추진될 행성 탐사에 있어서 로버를 통한 탐사 역시 고려하고 있다.
3. 국내 로버 기술 수준 국내 로버 기술 수준 분석 분석 및 발전 전략
1) 국내 로보 기술 수준 분석
국내에서는 행성 탐사용 로버를 개발한 사례가 없어 현재의 정확한 기술 수준을 파악하기 어렵다. 다만 ‘기초–응용’ 단계로 파악되며, 중장기(10년)적인 개발을 통해 습득할 수 있을 것으로 예상된다.


2) 국내 행성 탐사 로버 기술의 발전 전략
행성 탐사용 로버의 국산화 기술 개발을 위해서는 아래와 같이 네 가지 기술 및 인프라 요소를 개발하는 것으로 발전 전략을 수립할 수 있다.
- 첫째로, 관련 소재 부품 핵심기술의 개발이 필요하다. 행성 탐사용 로버에 필요한 소재 부품은 가혹한 탐사 환경에서 사용 가능한 고신뢰성 우주급 부품으로서 대부분 해외 의존성이 높다. 고진공 환경에 대비한 우주용 소재, 베어링, 윤활 등 기계 소재와 고전자파 및 극한 온도, 방사선 환경에서 사용 가능한 모터, 제어기, 센서, 전장 등 전장 소재 부품 기술을 필요로 한다. 우주용 미래 소재 부품 기술은 단시간 내에 확보할 수 없는 요소기술로서 단기(5년), 중장기(10년) 개발 기술로 이원화하여 개발하는 전략이 필요하다. 단기적 전략을 통해서는 선진사 소재 부품 도입 적용 및 벤치마킹을 통한 기술의 내재화를 실현하고, 중장기적 전략을 통해 국산화를 실현하는 방안 등의 전략을 수립할 수 있다.
- 둘째로, 행성 탐사 로버용 시스템 및 체계 개발 경험이 전무하여 이 분야에 대한 경험과 기술개발이 필요하다. 시스템 및 체계 개발 경험이 현재로서는 전무하지만, 국내의 앞선 미래자동차(자율차, 전기차), 로봇, ICT 등의 기술을 접목하여 빠른 추격이 가능할 것으로 판단된다. 따라서 국내 관련 산업을 통해 보유한 강점 기술들을 확대 적용하여 행성 탐사용 로버 시스템의 조기 개발을 달성할 수 있는 개발 전략을 수립할 수 있다.
- 셋째로, 국내 우주 전문 인력 및 기업 육성 등 정책적인 뒷받침이 필요하다. 현재 정부 주도의 우주산업은 주로 발사체 및 위성, 위성 정보에 집중되어 행성 탐사 모빌리티 관련 전문 인력과 도전 기업에 대한 지원 정책이 미흡한 실정이다. 향후 다가오는 우주 개척 시대를 대비하여 관련 기업 육성 및 전문 인력 양성, 국제 협력 강화, GVC 분석 등 민간 전문 기업이 자립화에 이를 수 있도록 지원 정책에 대한 전략을 수립할 수 있다.
- 마지막으로 개발 기관이 활용할 수 있는 전문 평가 장비가 필요하다. 행성 탐사 로버 및 부품을 개발하는 도전 기업의 글로벌 우주시장 진출을 위해서는 평가 및 성능 인증이 용이해야 한다. 이를 위하여 행성 탐사 로버의 부품 및 시스템 평가기술, 탐사환경 모사 장치 구축과 국내 연구기관 보유 장비의 협력 네트워크를 구축하는 지원 전략을 수립할 수 있다.

4. 맺음말
2024년 7월부터 2028년 12월까지의 개발 기간에 행성 탐사 로버용 액추에이터 소재 부품 기술 개발이 산업통상자원부 및 KEIT의 지원으로 시작되었다. 우주 탐사에 있어서 국제적인 협력의 중요성이 증대하는 시점에서 독자적인 기술을 보유할 수 있는 좋은 기회가 주어졌다고 생각된다. 상기 기술 개발 과제를 통해 얻어진 기술을 토대로 장차 다가올 한국형 달 탐사 및 화성 탐사 미션이 순조롭게 진행되기를 기대해 본다.
출처 및 참고자료
1. “달 탐사 모빌리티 개발을 위한 기획 연구”, KAIST, 2022.
2. “한국형 달 탐사 2단계 사업 기획 연구”, KAIST, 2017.
3. Nitin Yadav, et al., “Design analysis of Rocker Bogie Suspension System and Access the possibility to implement in Front Loading Vehicles”, IOSR Journal of Mechanical and Civil Engineering Vol 12, Issue 3, pp. 64-67. 2015.06.; DOI:10.9790/1684-12336467
4. Crawford, Ian, “Lunar Resources: A Review”, Progress in Physical Geography Earth and Environment Vol. 39., pp. 137-167. 2015.04.; DOI:10.1177/0309133314567585
5. wikipedia.org: Lunokhod programme; Sojourner (rover); Pragyan(Chandrayaan-3)
작성자
이영훈 실장 / 한국산업기술기획평가원(KEIT) 조선방산항공실 박승욱 책임연구원 / 한국자동차연구원(KATECH) 플랫폼안전기술 부문
'산업기술' 카테고리의 다른 글
| 공작기계 운용 에너지 효율화 기술 동향 (0) | 2025.02.05 |
|---|---|
| AI 자율제조기술 동향 (0) | 2025.02.04 |
| 차세대 무인선박기술 및 법 제도 동향 (0) | 2025.02.03 |
| R&D 예타 폐지 법 개정안 국무회의 통과 (0) | 2025.02.03 |
| 미래차 산업 패러다임 변화에 따른 SW 기술 개발 동향 (0) | 2025.02.02 |



댓글