안녕하세요~ 할로파파입니다~ :)
오늘도 날씨가 많이 차갑습니다. 모두들 건강 조심하세요~
오늘은 자동차산업의 지능화/서비스화 등의 혁신적인 변화를 이끌고 있는 자율주행차량의 자율주행 상용화를 위한 "차량 안전기술 동향"에 대한 정보를 공유해 보고자 합니다.
할로파파도 관심 있는 분야로 인간의 삶을 크게 변화시킬 수 있는 산업이라고 생각됩니다. 인간의 생명과 직결되는 만큼 안전에 관한 부분은 중요하리라 봅니다.
정보전달의 순서는
1. 자율주행차 상용화 현황
2. 자동차 주행안전 기준 동향
3. 자동차 주행안전 기술 동향
4. 결론
순으로 진행하도록 하겠습니다.
1. 자율주행차 상용화 현황
1) AI와 빅데이터로 촉발된 4차 산업혁명의 영향으로 자율주행차 및 미래차 서비스의 조기 상용화에 대한 기대감 상승
- IT 기업 중심으로 완전 자율주행차와 서비스를 선보이고 실증에 돌입하였으며, 완성차 기업들도 자율주행기술과 서비스에 대한 대규모 투자를 단행하고 이업종과 합종연횡을 진행
※ 구글 웨이모 로봇택시 시범운행(’18) 시작, 첫 자율주행차 공장 설립 발표(‘19. 4)
※ 테슬라 2020년까지 로봇택시 1백만대 도입 계획 발표(‘19. 4)
※ 구글연합(볼보, 포드), 인텔연합(BMW, 모빌아이), 퀄컴연합(아우디, 화웨이, 노키아) 등 합종연횡
- 급성장하는 새로운 자율주행차 생태계 환경에서 New Player가 Game Changer로 등장하고, 미래차시장을 선점하기 위해 사활을 건 경쟁에 돌입함
※ 모빌아이는 비젼기반 센서모듈로 전세계 시장 과점, 인텔에 153억달러에 인수됨(‘17. 3)
※ 테슬라는 레벨3 상당 전기차 판매로 미래차 선두그룹 부상, GM의 주가총액을 2배로 상회(‘20. 1)
※ 현대차는 앱티브(Aptiv)에 40억달러 투자하여 합작사 설립하고 자율주행용 S/W를 개발(‘20. 3)
- 자동차산업 패러다임은 자율주행차로 빠르게 전환되고, 2030년 이후에는 자율주행차가 주요 교통수단으로 정착될 것으로 예상함
※ 자율주행차는 ‘25년까지 세계 자동차 판매의 4%, ’35년 75%를 차지할 것으로 예측하고 있으며, 세계시장 규모는 ‘20년 189억 달러에서 연평균 28.4% 성장하여 ’35년에는 1,152억 달러 규모에 달할 전망임(Navigant Research, 2016)
※ 개인 여가시간 증대(50min/day), 공유경제를 통한 차량 수 감소에 따른 환경 및 주차난 등 사회적 문제 해소(연료소비 60% 감소), 교통사고 경감(90% 이상) (McKinsey & Company, 2015)
2) 자율주행차 패러다임을 선점하기 위한 경쟁이 치열하게 진행되면서 안전성에 대한 사회적 우려 증가
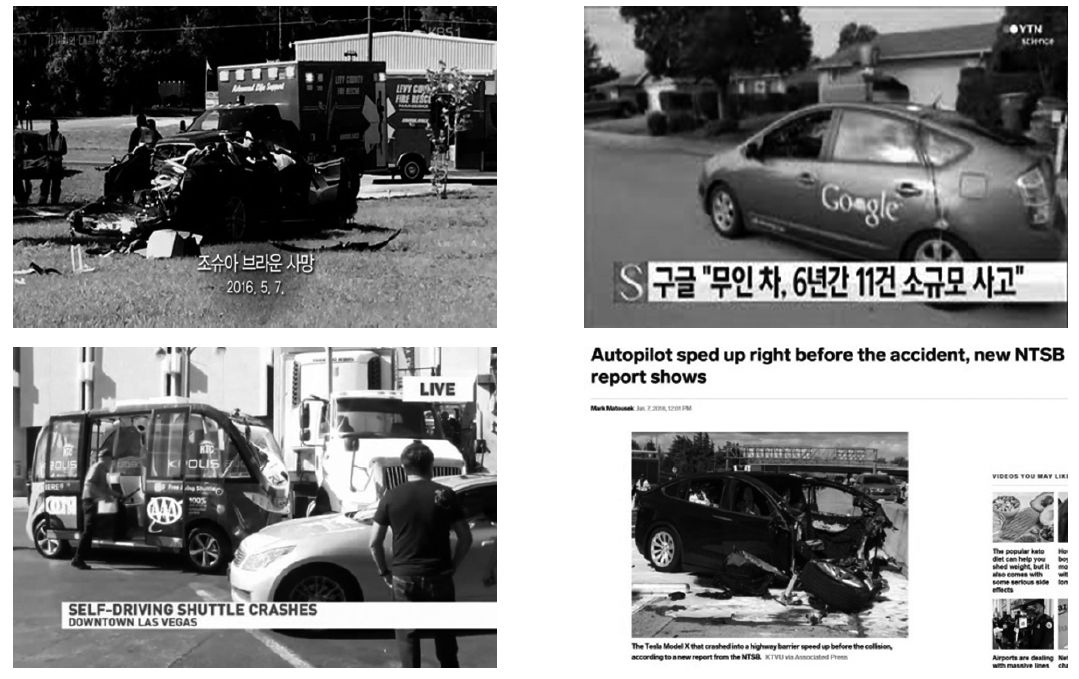
- 자율주행차에 대한 대중의 관심이 집중되고 기대치가 매우 높으나 기술적으로 아직 완전하지 못한 상황으로 최근 자율주행 자동차의 사고가 빈번히 발생하고 있음
① 자율주행차의 많은 장점에도 불구하고 단 한건의 사고만으로도 기술에 대한 소비자들의 반감과 우려가 대폭 증가하고 자칫 자율주행차 산업육성에 심리적인 장벽이 될 우려가 있음
※ 미국 테슬라 자율주행차 오작동 관련 사망사고 발생, 구글 무인차 6년간 11건 소규모 사고 발생, 미국내 완전자율주행차를 개발하여 운행하는 첫날 교통사고가 발생 등 자율주행차의 위험성이 지속적으로 제기되고 있음
3) 아직까진 불완전한 자율주행차의 안전성을 확보하기 위한 방안을 모색
- 미국 캘리포니아주에서는 자율주행차의 운행 중 자율주행모드 해제가 발생한 상황의 원인을 운전자·차량·환경 요인으로 분류하여 보고하도록 의무화하고 있음
※ 2015-2016 보고서에 따르면 자율주행모드 해제원인 중 자율주행시스템 이상이 49%, 운전자 불안감 등 주관적 판단에 따른 해제가 22%, 보행자 등 교통이용자가 11%를 차지함
※ 특히 차량 고장이 4%를 차지하며, Google의 경우 18%에 달해 보다 완벽한 차량안전기술의 적용이 시급한 것으로 판단됨
- 자율주행차를 포함한 미래차의 안전성을 보장하기 위해서는 차량에 이상이 발생해도 사고위험을 최소화할 수 있는 다중안전 기술기반의 주행플랫폼이 필수
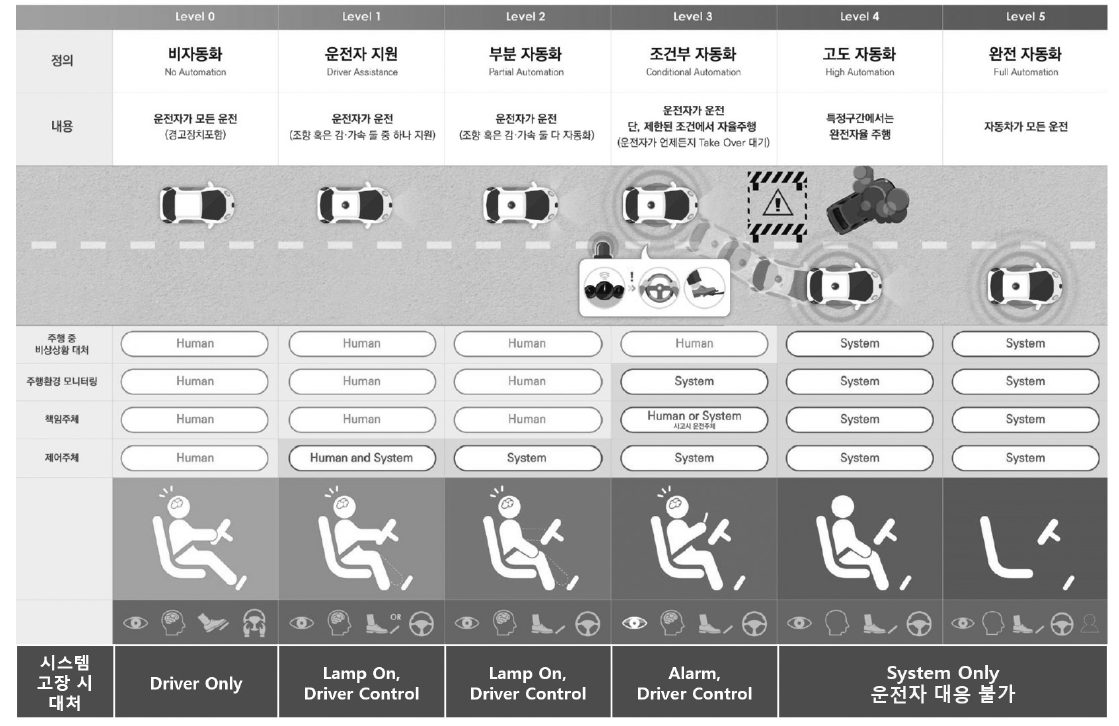
① ADAS가 적용된 레벨 0~2 차량에서는 고장을 감지하여 알리고 운전자의 조치에 의존하는 수동적 안전개념인 고장안전(Fail-Safe) 시스템이 적용됨
② 부분적인 자율주행 단계인 레벨 3과 그 이상 레벨에서는 시스템에 이상이 발생해도 운전자가 개입하기 전에 스스로
위험상황을 극복하는 다중안전 설계 기반의 고장제어(Fail Operational) 시스템이 필요
※ 조향과 제동, 구동 등 주행관련 시스템은 다중모드를 통해 독립 작동하는 리던던시 확보
※ 자동차 전장부품에 대한 기능안전규격(ISO26262)에서도 다중모드 설계 권고
※ 자동차기준 국제조화 포럼(UNECE/WP. 29)에서는 자율주행차용 엄격한 안전 요구기준을 검토 중
3) 주요 국가의 관련 정책
- 각국 정부는 민간의 자율주행차 개발을 지원하고 도로운행을 위한 인프라구축(통신, 충전소), 대규모실증단지마련, 법제개혁등 추진 중
- (미국) 실제 도시형 테스트베드를 구축하고 세계 최초 자율주행 가이드라인 발표
※ 네바다주에서 ’12년에 최초로 자율주행차의 일반도로 시험운행 합법화
※ DOT는 ’16년 1월, 자율주행차를 국가전략기술로 선정, 10년간 40억 달러 투자 발표
※ 미시간 대학 내에 세계 최초의 자율주행차 테스트베드(M-City) 구축
[표] 미국 자율주행차 법제화 경과
| '09 | '11 | '12 | '12~'15 | '16 | '17 | '18 |
| 구글카 시범 운영 |
구글카 사고 발생 (적용규정 없음) |
자율주행차 합법화 (네바다, 캘리포니아) |
플로리다, 애리조나, 오클라호마, 하와이, 미시간주, 워싱턴DC, 테네시, 유타주 합법화 |
NHTSA 자율주행 가이드 V1.0 (Federal Automated Vehicles Policy) |
자율주행법, NHTSA 자율주행 가이드 V2.0 |
NHTSA 자율주행 가이드 V3.0 |
- (독일) ‘22년까지 98% 가구를 5G 연결하고 ’30년 완전자율주행 상용화 목표
- (중국) 30개 도시 5G 테스트베드 구축 중이며 ‘30년 레벨4 자율주행차 10% 계획
- 국내에서도 대·중·소기업이 자율주행차 관련기술을 조기에 선점하고 실용화할 수 있도록 정부가 이를 위한 투자계획,
법·제도 마련, 인프라 구축을 준비하고 있음
- 관계부처 합동 미래자동차 산업 발전전략(`19. 10)에서 2030년 국가 로드맵으로 ‘미래차 경쟁력 1등 국가’ 도약으로 정하고, ‘27년 전국 주요 도로의 완전자율주행(레벨4)의 세계 최초 상용화를 제시
※ ‘21년 레벨 3 자율차 출시 → ‘24년 레벨 4 일부 상용화 → ‘27년 레벨 4 전국 상용화
※ 완전자율주행 통신인프라 등을 전국 주요 도로에 완비(‘24), R&D → 상용화의 발전단계별 규제정비·未備규정 마련(‘24)

2. 자동차 주행안전 기준 동향
1) 자동차의 기능안전(Functional Safety)을 위한 표준
- 자동차 기능안전은 제어 핵심장치인 전기·전자 시스템의 오동작 및 고장에 대해 전기·전자적 메커니즘을 이용하여 능동적으로 대처함으로써 운전자·탑승자, 타운전자 및 보행자의 안전을 보장하기 위한 설계, 시험 및 평가 기술의 총합임
① 기능안전표준(ISO 26262)은 자동차에 탑재되는 전장시스템의 오류로 인한 사고방지를 위한 자동차 기능안전 국제규격으로 시스템의 안전 요구 수준에 따라 ASIL 등급을 정의하고 이에 따라 개발, 시험 및 평가 수준이 결정됨
※ ASIL(Automotive Safety Integrity Level): A, B, C, D 등급 (D등급이 최상)
② 국제 표준을 주도한 유럽 OEM 및 주요 Tier 1 그룹은 ISO26262 프로세스를 적용한 시스템 개발을 활발히 진행
※ BMW, AUDI, Volvo 등 주요 OEM은 운영 조직 신설을 바탕으로 각 분야별 아이템 정의, HARA, ASIL 및 Safety Goal을 설정
※ 협력업체가 TSR(Technical Safety Requirements)을 작성하고, TSR의 최종 인증은 OEM이 수행하는 시스템으로 협력체계를 운영 중
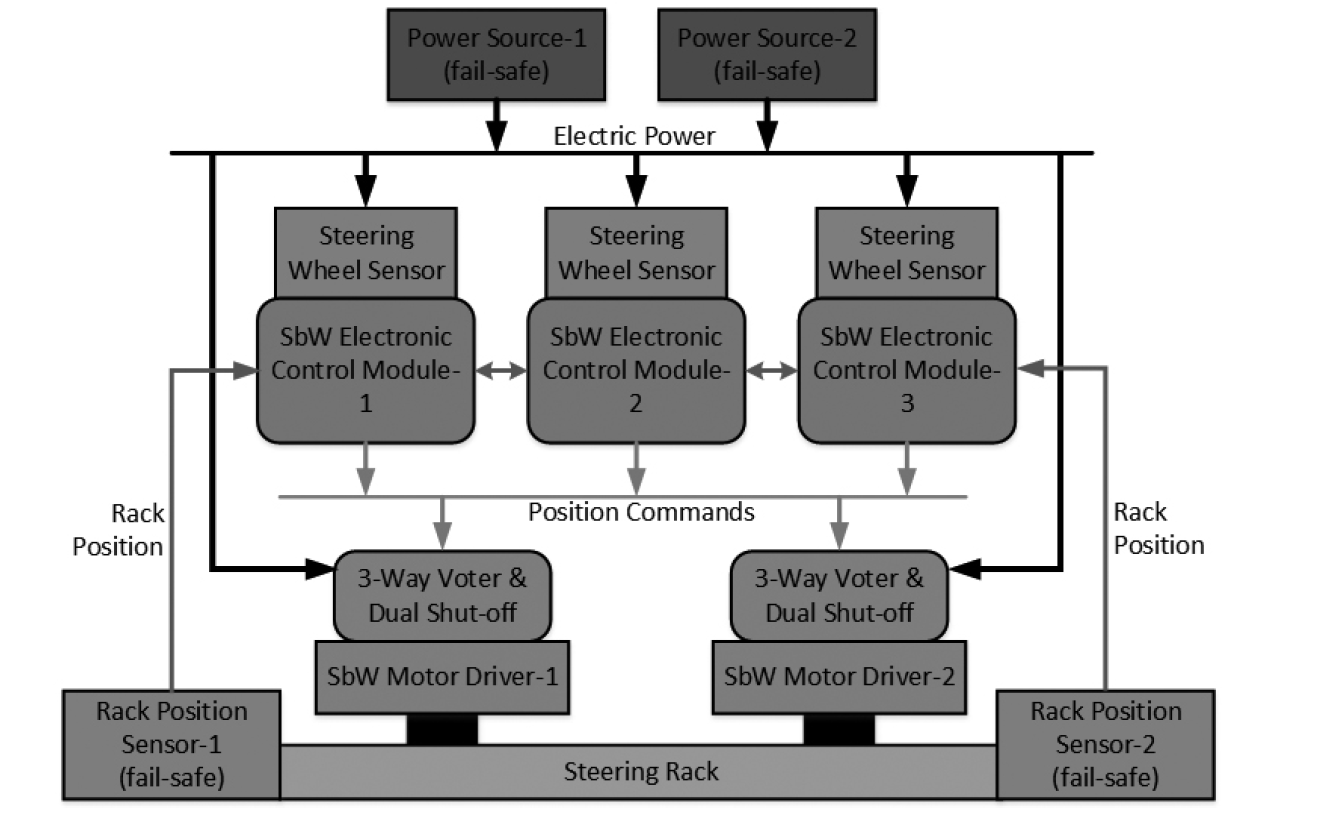
- 미국 NHTSA(National Highway Traffic Safety Administration)는 ADAS 주요 시스템의 기능안전을 위한 아키텍처
권고안을 발표. 특히 조향시스템은 차량이 안전한 주행을 위해 필수적인 시스템으로 전력, 센서, 액추에이터의 다중화를
권고함
※ GM 社 Cruise AV 내 조향 및 제동 엑추에이터는 다중 모터, 다중 제어기, 다중 전원부를 도입하여 고장 상황에서도 안전하게 제어될 수 있도록 설계
2) 의도된 기능의 안전(Safety of Then Intended Functionality)에도 주목
- 의도된 기능의 안전(SOTIF) 표준(ISO/PAS 21448)은 기능안전(ISO 26262)과 달리 오작동, 고장, 결함에 관련된 것을
다루는 것이 아니라, 의도된 설계 자체가 안전을 확보하기에 불충분·부적절한 경우를 고려
① 기능안전을 준수하는 완벽한 S/W 및 H/W를 탑재한 차량이 센서나 시스템의 성능 제한, 예기치 않은 도로 환경의 변화, 예상할 수 없는 운전자의 기능 오용, 불완전한 기계학습 알고리즘 등으로 사고가 발생할 수 있음을 인식하고 위험한
조건을 식별하기 위한 표준화로 시뮬레이션과 충분한 실차 테스트를 요구함
※ SAE 자율주행 레벨 1, 2에 대한 가이드로 ISO/PAS 21448 제정(‘18)
※ SAE 자율주행 레벨 3-5에 필요한 기술적 요구사항으로 Machine Learning, HD맵, Validation Target, Minimum Risk Condition 고려, AI 요구사항, Driving Policy 등 표준화(‘19)
[표] 고장과 비고장에 대한 대응을 위한 표준 확대
| 표준 | ISO26262: 2018(제2판) | SOTIF ISO/PAS 21448 |
| 위험원의 요인 | 전장시스템의 고장 - Systematic failures (S/W, H/W 설계 및 도구의 버그) - Random hardware failures (시스템 사용중 발생하는 영구 고장 및 일시적 고장) |
결함 또는 고장 없이 의도하지 않은 동작 - 전장시스템의 성능 한계 - 예측 불가능한 사용자 오용 - 자동차 주변 영향(다른 차량, 인프라, 날씨, EMC 등 환경) |
3) 자율주행차의 주행안전을 위한 법규 제정
- 자동차안전 국제기준 제정기구인 UN/UNECE/WP29(자동차기준 국제조화 회의)
① 국가별로 상이한 자동차 기준이 국제무역상 장애요소로 작용하는 문제 해결을 위해 1952년 유럽 국가들을 중심으로
기준조화를 추진, 1995년 문호를 전 세계에 개방하면서 자동차 안전기준 조화분야의 유일한 글로벌기구가 됨
② 현재 한국, 미국, 유럽, 일본, 인도 등 주요 자동차 생산국이 모두 참여하여 자동차 기술규정의 제·개정 및 이를 바탕으로 체약국 간 상호인정을 추진하고 있음
[표] UN/UNECE/WP29 구성 및 주요 업무
| 기구 구성 | 주요업무 | |
 |
GRSP (충돌/충격분과) |
충돌 충격분야 UN 규정 및 세계기술규정제/개정 논의 |
| GRSG (일반안전분과) |
자동차 구조, 창유리, 시계범위, 지시표시장치 등 관련 일반 안전 UN 규정 및 세계기술 규정제/개정 논의 | |
| GRVA (자율주행자동차분과) |
자율주행자동차 관련 UN 규정 및 세계기술 규정 제정 논의 | |
| GRPE (오염/에너지분과) |
자동차 배출가스, 연비, 엔진출력 등 관련 UN 규정 및 세계기술 규정 제/개정 논의 | |
| GRBP (소음 및 타이어분과) |
자동차 소음 및 타이어 관련 UN규정 및 세계기술규정 제/개정 논의 | |
| GRE (등화장치분과) |
자동차 등화장치 관련 UN규정 및세계기술 규정 제/개정 논의 | |
- UN/UNECE/WP29에서 자율주행차 주행안전기준(레벨 3, 전용도로) 추진
① 자율주행차 전문분과(GRVA)를 신설(2018.6)하여 운영해왔으며, 최근 레벨3 자동차로유지시스템(ALKS)에 대한 기준안을 채택(‘20. 3)
※ 정상상황에서 안전하게 차선 및 타 차량과의 간격을 유지 하고 차선을 변경하기 위한 기준과, 고장 및 급박한 위험 등 이상상황 발생 시 안전한 대처를 위한 위험최소화운행의 기준을 포함
※ WP29 총회에서 기준안 최종 채택 예정(’20. 6)이며 ’20년 하반기에 공포될 것으로 예상
※ 신규기준은 자동차선유지시스템을 장착한 승용차의 형식승인에 적용

[표] UN/UNECE/WP29 자율주행차 주행안전기준(Level 3, 전용도로) 요약
| 항목 | 기준 |
| 시스템의 감지거리 및 지정최대 속도 |
• 제작자는 주행하는 도로의 제한속도 범위에서 부분 자율주행시스템의 감지거리에 따라 자동차로유지기능이 허용되는 지정최대속도를 정할 것 • 제작자는 부분 자율주행시스템이 감지할 수 있는 최대거리에 시간에 따른 성능 저하를 고려한 열화계수와 우천 등 주변 환경으로 인한 성능제한 등을 감안한 환경계수를 고려하여 감지거리를 정하되 이는 시스템 운행조건에 따라 요구되는 전방최소안전거리 이상이어야함 |
| 위험최소화 운행 |
• 위험최소화운행이 시작된 경우 4m/s2를 초과하지 않는 감속도로 차로 내에 감속하고, 차선표시가 분명하지 않은 경우는 주변의 교통 및 도로환경을 감안한 적절한 경로 내에서 감속할 것. 다만, 심각한 고장이 발생하였거나 운전자에게 경고를 주기 위하여 짧은 시간 내에 감속하는 경우에는 감속도 4m/s2를 초과할 수 있음 • 위험최소화운행 시작 후 4초 이내에 비상경고신호등을 점멸시킬 것 • 위험최소화운행이 수행되는 동안 운전자가 운전조작을 재개하지 않는 경우 자동으로 주행 차로 내에 안전하게 자동차를 정지시킬 것 • 위험최소화운행 시 차로변경이 가능하도록 설계된 시스템은 위험최소화운행 시 갓길 또는 사고 위험이 적은 차로로 차로를 변경하거나 상기의 기준에 따른 차로 내에서의 위험최소화 운행을 수행할 것 • 차로변경은 안전구역 내에 다른 자동차 및 장애물이 없는 경우에만 수행될 것 |
| 자동차로 변경 |
• 자동차로변경기능은 규정된 전방, 측방 및 후방 최소거리까지 인접차로의 자동차를 감지할 수 있을 것 • 시스템의 감지거리에 따라 자동차로변경기능이 허용되는 지정최대속도를 정할 것. 다만, 자동차로변경기능은 해당 도로의 제한 속도 이하에서 작동할 것 • 전방 감지 요구거리는 시스템이 감지해야하는 최소거리를 의미하며 이는 자동차 제작사가 정할 것. 다만, 자율주행시스템 운행조건에 따라 요구되는 최소안전거리 이상일 것 • 후방 감지 요구거리는 시스템이 감지해야하는 최소거리를 의미하며 55m 이상의 범위에서 자동차 제작사가 정할 것 |
- 국내에서 세계 최초로 부분 자율주행차(레벨 3) 안전기준 발표(‘20. 1)
① 안전기준의 도입으로 자율주행차의 개발 및 상용화가 더욱 용이해질 것으로 예상되며, ‘20.7.부터 자동차로유지기능이 탑재된 레벨 3 자율차의 판매가 가능해짐
3. 자동차 주행안전 기술 동향
1) 리던던시를 포함한 다중안전 섀시 시스템
- 레벨 4 이상의 자율주행차는 시스템이 주행기능(DDT, Dynamic Driving Task)을 전부 수행하고, 운전자는 해당 모드에서 개입이 불필요하며, 시스템이 적절한 시점에서 운전자 개입요청 및 미개입 시 백업 기능을 실시해야 함
- 주행안전시스템의 관점에서 보면 이를 위하여 복수의 액추에이터(리던던시 시스템)를 장착함으로써 메인 주행시스템이 고장이 났을 경우 대비를 할 수 있음
[표] 제동 및 조향 시스템 다중안전 설계 개념(현대자동차, '19. 11)
| 도메인 | 제동 | 조향 |
| 다중안전설계 |  |
 |
- 주요 자동차부품업체들은 자율주행차용으로 이중안전장치를 갖춘 제동시스템을 개발하고 있으며, 전동식 통합 동시스템과 기존의 ESC(Electronic Stability Control System)를 조합하는 형태가 일반적인 추세로 나타나고 있음
※ Bosch는 iBooster라는 이름의 전동기계식 통합 제동시스템과 ESP를 결합한 형태로 레벨 4-5의 자율주행차를 지원함. 각각의 치는 다른 하나의 장치에 고장이 발생해도 단독으로 차량을 제동시킬 수 있으며, 제동 중에 차량의 조향 또한 가능하도록 함
※ Continental은 통합 제동시스템 MK C1과 ESC(MK100 HBE)를 결합한 제품을 MK C1 HAD로 명명하여 자율주행차에 대응하고 음. 기본적으로 Bosch와 동일한 컨셉의 제품이며, MK C1의 완전한 고장 시에도 ESC만으로 전륜에 완전한 ABS 기능을 공하며, MK C1이 유압 생성은 불가하지만 제어밸브가 동작하는 경우에는 후륜 제동도 가능함
※ ZF(TRW)에서도 동일한 형태로 통합제동시스템인 IBC와 ESC를 결합한 제품을 선보임
[표] 해외 선진 부품사의 다중안전 제동시스템 컨셉
| 제조사 | 제품 사진 | 주요 기능 |
| Bosch |  |
▶iBooster: 배력, Pedal Simulating ▶ESP: ESC 및 부가기능 iBooster 고장 시 제동가능 |
| Continental |  |
▶MK C1: 배력, Pedal Simulating ESC 및 부가기능 ▶MK 100 HBE: ESC 및 부가기능 MK C1 고장 시 제동가능 |
| ZF(TRW) |  |
▶IBC: 배력, Pedal Simulating ESC 및 부가기능 ▶ESC-PH: ESC 및 부가기능 IBC 고장 시 제동가능 |
- 자율주행차를 위한 조향시스템도 기존 EPS 시스템이 추구해온 Fail-safety 기술에서 고장 발생 시 동작이 가능한 ailoperational EPS로 발전하고 있음
① 기존 EPS에 적용되는 Power, Sensor, 통신, 모터의 이중화를 통해 고장 발생에 대응하고 있고, 특히 모터 형태와 위치에 대한 개발이 이루어지고 있고, 일부는 이미 양산되어 일부 차량에 적용되고 있음
※ Bosch와 Denso의 경우 모터의 이중화는 기존 EPS 모터 내부에 이중권선형 모터와 이를 구동할 수 있는 ECU 이중화의 접근이 이루어지고 있음
※ SHOWA와 NSK는 다중안전 설계 EPS를 개발하고, SHOWA는 2015년부터 혼다의 Civic, CR-V에 적용하고 있고, 2020년 2번째 버전 양산을 준비 중임



- 레벨 4 이상의 자율주행차는 운전자가 배재될 수 있기 때문에 기존의 EPS 형태가 아닌 SBW(Steer by wire) 시스템에
대한 연구가 진행되고 있음
① SBW는 조향핸들과 Road-wheel 사이의 기계적인 연결을 제거하고 전기신호만을 전달시키는 조향시스템으로,
조향핸들과 독립적으로 주행 성능을 향상시킬 수 있는 다양한 능동 제어 기능 구현이 가능함
② SBW는 물리적인 구속이 배재되기 때문에 시스템 불능 시 이를 보완하기 위한 H/W 및 S/W 다중안전 구조의 컨셉
개발이 필요함
※ Road-wheel 모듈의 불능 시 작동을 위한 기계적 클러치, 모터, ECU, 센서, 전원 다중화에 대한 연구가 진행되고 있음
※ SBW 시스템의 고장모드 및 발생원인 별 대응을 위해 FMEA, FTA 분석 등 정량적 접근을 통해 안전성을 확보하기 위한 연구가 진행되고 있음
※ Bosch는 자율주행 단계별 고장 허용 EPS 시스템을 구현하기 위한 E/E 아키텍처를 제시


③ Nissan은 2014년에 최초로 SBW 시스템이 적용된 Infiniti Q50 차량의 양산을 시작하였고, 2018년 Q60으로 확대 생산하고 있음
※ Redundancy 기반 이중안전 SBW 시스템, 조향성능 및 안전성 향상, 단안영상센서를 통한 주행 외란보상 기능이 적용됨
※ Redundancy는 Road-wheel과 조향핸들사이에 기계적인 클러치, Road-Wheel에 듀얼피니언에 2개의 모터, ECU 3개가 적용되고, 전원 이중화를 통해 구현되었음
[표] 다중안전기술 기반의 SBW(Steer-by-Wire) 시스템 (닛산 인피니티 Q50)
| 시스템 구성 | 기능 |
 |
❶ Resistance feedback motor ❷ Clutch for fail-safety ❸ 3 independent Electric Control Units(ECUs) - ECU 1 for Resistance feedback motor and Clutch - ECU 2 and 3 for Left and Right-side Steering-assist motors, respectively ❹ Steering-assist motors (for Adaptive Steering) - Left and Right Steering-assist motors |
- 자율주행차의 다중안전성 확보를 위해 전륜 조향시스템과 후륜 조향시스템의 협조제어에 대한 연구가 진행되고 있음
※ 후륜 조향시스템은 저속에서는 회전반경을 감소하고, 고속에서는 차량의 민첩성을 향상시키기 위한 조향시스템임
※ 후륜 조향시스템은 물리적으로 일체화된 시스템과 좌우측이 분리된 시스템으로 분류되고 있고, 분리된 후륜 조향시스템의 경우 차량 회전 시 Toe 각의 좌우 독립제어를 통해 차량 선회 안정성을 향상시킴

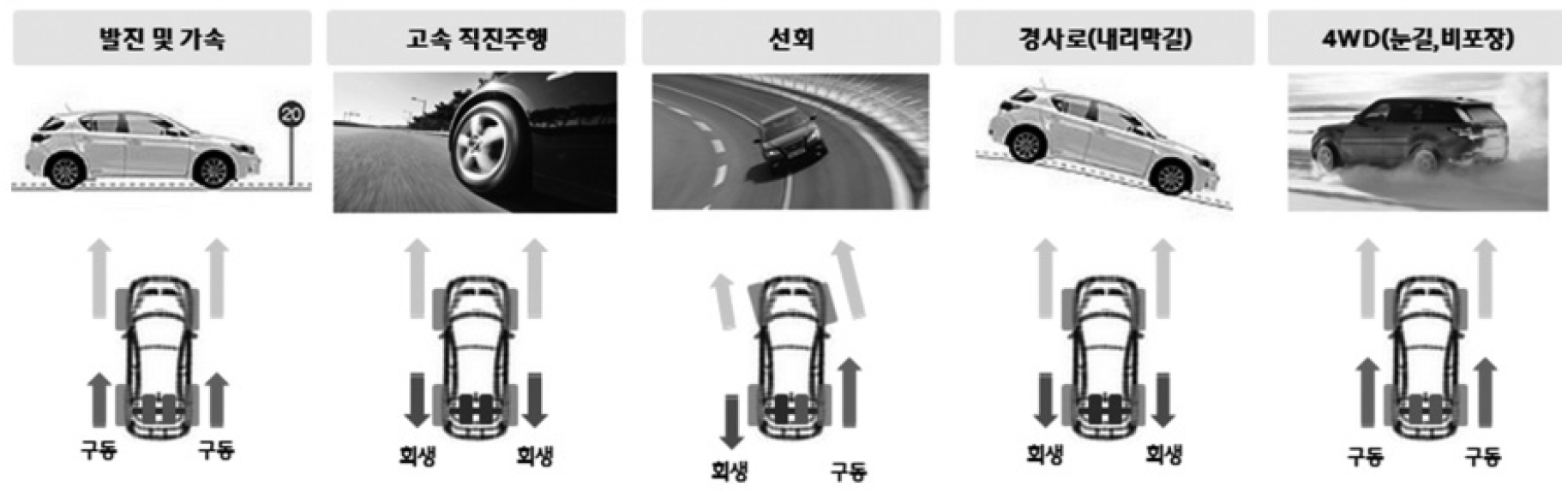
2) 미래차를 위한 구동 시스템
- 미래차용 구동시스템으로 인텔리전트 4WD 기술이 발전하고 있으며, 시스템은 기계식에서 전자식으로 진화하고,
친환경·고효율 기술을 적용하여 에너지 효율과 차량 연비를 향상시킴

- 차량 주행 조건에 따른 능동적인 구동력 최적화 제어를 통해 차량의 주행성능을 향상시키는 기술 개발
- 토요타는 독립 구동이 가능한 축 일체형 고성능 전기구동 시스템 개발
※ Prius와 RAV4 차량에 후륜 AWD-e (All wheel drive-electric) 기술 탑재(‘19)
※ 후륜 구동 모터는 최대 5.25kw의 출력과 55Nm의 토크로 차량 속도 70km/h까지 보조 가능
- 독일 폭스바겐은 독립 구동이 가능한 축 일체형 고성능 전기구동 시스템 개발
※ ROOMZZ01 차량에 2개 모터, 후륜 독립 구동이 가능한 four-wheel drive 시스템 탑재(‘19)
※ 배터리 82kWh, 전륜 모터 75kW, 후륜 모터 150kW로 차량 속도 180km/h 제한, 제로백 6.6초
- 일본 토요타는 Dynamic torque vectoring AWD가 적용된 E-Four 시스템 개발
※ 기계적으로 좌/우 토크가 분배되며 전륜과 후륜의 연결을 해제시킴으로써 이륜구동을 통해 약 80%의 연비 절감 효과
※ 하이브리드 자동차 후륜 축에 모터 장착, 전/후에 최대 20:80 동력 분배

3) 주행안전시스템 통합제어 및 주행플랫폼
- 최근 주행안전시스템의 통합제어기술은 고성능 운동성능 구현(agility, maneuverability, stability)과 고장제어(Fail
Operational) 기술 개발이 이뤄지고 있으며, 또한 ADAS의 환경 센서를 활용한 Preview 제어 적용을 통한 핸들링 및
승차감 성능 개선 측면의 개발도 많이 이뤄지고 있음
- OEM 주도의 개발이 이뤄지고 있으며, 일부는 별도의 통합 ECU가 탑재되고, 주요 개발 기능은 주로 통합 상태판단,
통합섀시제어, 주행모드 등임
※ TOYOTA VDIM(Vehicle dynamic integrated management), Lexus LDH(Lexus dynamic handling), Volvo DSTC(Dynamic stability and traction control), Volkswagen DCC(Dynamic chassis control) 등

- 국내에서는 현대기아자동차가 현대모비스, 만도 등과 통합제어 기술을 개발하여 양산차량에 적용 중
※ 조향제어와 제동제어가 통합 작동하여 안정성을 향상시키는 섀시통합제어를 씨드에 최초 적용(‘09), 코너링 시 언더스티어를 저감시키는 제동-AWD 통합제어를 싼타페 적용(’12)
※ 2012년 ESC가 의무 장착된 이래 ESC를 중심으로 한 통합제어 기술개발을 진행함. ESC와 EPS, ESC와 AWD, ESC와 ECS(Electronic Controlled Suspension) 통합제어 등이 양산 적용
- GM의 Cruise AV(4th Gen.)에는 자율주행차의 주행안전성 확보를 위한 다중안전 기반의 최신 주행플랫폼 기술이 대거
적용됨
① GM의 Cruise AV(4th Gen.)에는 자율주행차의 주행안전성 확보를 위한 다중안전 기반의 최신 주행플랫폼 기술이 대거
적용됨
② 조향 및 제동 엑추에이터에 다중 모터, 다중 제어기, 다중 전원부를 도입하여 고장 상황에서도 안전하게 제어될 수
있도록 설계
자율주행시스템에 대한 상시 모니터링 및 고장진단을 위한 PHM 기술 적용
※ PHM(Prognostics and Health Management, 고장예지 및 건전성관리)
③ PHM(Prognostics and Health Management, 고장예지 및 건전성관리)
- 그 외에도 시스템 통신 다중화, 극악상황에 대비한 강건설계 기술 적용
주행시스템 도메인간 협조제어를 통해 리던던시 기능을 구현하는 연구가 진행 중
①“Steer-by-Something”은 토크 스티어 현상을 적극 활용하여 액추에이터 추가나 시스템 이중화 없이 차량 내 기존
구동 및 제동 시스템을 활용하여 조향 리던던시를 구현하는 기술로 연구 중
② 도메인간 협조제어를 통한 리던던시 확보기술은 섀시나 구동 시스템의 다중안전 설계에 따른 비용상승을 크게
줄여주면서도 안전성을 확보해주는 미래차 주행플랫폼 핵심기술로 주목
[표] 도메인간 협조제어를 통한 조향 리던던시 구현 개념
| 원리 | 구동 및 제동 토크 기반 리던던시 조향 구현 |
 |
 |
4. 결론
1) 자동차산업의 패러다임 변화와 사회적 필요로 자율주행차의 활성화 기대
- 자율주행차는 자동차산업의 지능화·서비스화 등의 혁신적인 변화와 함께 교통사고 해소 등의 사회적인 문제를 해결하기 위하여, 전 세계적으로 상용화 연구가 활발히 진행하고 있으며, 향후 미래형 자동차 시장을 견인하게 될 것으로 예측된다.
- 자율주행차는 자동차산업의 지능화·서비스화 등의 혁신적인 변화와 함께 교통사고 해소 등의 사회적인 문제를 해결하기
위하여, 전 세계적으로 상용화 연구가 활발히 진행하고 있으며, 향후 미래형 자동차 시장을 견인하게 될 것으로 예측된다.
* 미래의 자율주행 대중화 시대에는 코로나19의 국난 시에도 안전한 교통시스템을 제공*하며 빛을 발할 수 있을 것이다.
2) 자율주행 미래차의 상용화를 위한 주행안전 기술개발 필요
- 자율주행차 사고에 대한 소비자의 불안감은 미래차산업발전을 저해하는 요인이다.
- 사고 없는 안전한 자율주행차를 위해서는 기술적 혁신을 통한 안전성을 확보 하여야하며, 아울러 초기수용자도 구매 가능할 수 있도록 비용 절감이 필요하다.
① 자율주행차는 인지/판단 영역의 레이더, 라이더, GPS, AI컴퓨팅모듈 뿐만 아니라, 제어를 위한 안전한 주행플랫폼이 수반되어야만 자율주행 고도화가 가능하다.
② 최적의 리던던시를 갖는 개별적 고도의 주행부품 설계기술과 도메인간 협조제어를 통해 경제성을 확보한 미래차용 주행플랫폼에 대한 연구가 필요하다.
지금까지 자율주행 상용화를 위한 차량 안전기술 동향에 대해 알아보았습니다. 자율주행 상용화는 인간에게 많은 편의성을 제공하는 동시에 안전이라는 중요한 해결과제가 있는 것 같습니다. 이 또한 가까운 미래에 최적화되고 보편화되는 날이 오겠지요?
최근 판매되는 일반차량의 스마트 크루져 등 반자율 주행 시스템을 사용해 보면 상당히 편하다는 느낌을 받았습니다. 대신에 모든 것을 자율주행 차량에 맏길수 없는 것은 부정할 수 없을 것 같습니다.
오늘 하루도 파이팅 입니다~ ^^
댓글