자율주행차 인지센서 상용화기술과 산업전망
목차
1. 자율주행차산업 패러다임 변화
2. 자율주행 구성기술 및 특징
3. 자율주행 인지센서 주요 특징
4. 자율주행 인지센서 개발 동향
5. 맺음말
1. 자율주행차산업 패러다임 변화

(산업 패러다임 변화) 자동차산업의 패러다임 변화와 함께 교통사고로 인한 인명손실과 사회적인 문제를 해결하기 위해서 전세계적으로 자율주행기술의 개발 및 상용화 연구사례가 증가하고 있으며, 향후 미래형 자동차 시장을 견인하게 될 것으로 전망
★ 현재 전 세계적으로 자율주행 SAE 레벨 2 수준의 차량이 양산되고 있으며, 향후 미래시장의 점유를 위해 경쟁적으로 SAE 레벨 4 수준의 완전자율주행 기술개발 투자가 진행
- 자율주행차는 미국 SAE 기준으로 레벨 0~5까지 구분되어 있으며, 현재 차량에 장착된 운전자의 안전운전을 지원하는 ADAS 수준은 자율주행 레벨 1단계에 해당
★ 자율주행기술은 기존의 서라운드 센서 등 자동차 독립적으로 개발되던 영역을 벗어나, 소프트웨어, 통신, 보안, ICT 인프라, IoT센서, 인공지능 등 거의 대부분의 영역과 융·복합이 진행될 것으로 전망
(자동차 업계의 3대 미래 트랜드) 디지털화, 자율주행화, 전기동력화 등으로 분석되며 모두 SW가 필수적인 요소로 이런 점이 자동차 업체가 SW를 중심으로 하는 업체로 변신을 꾀하고 아울러 SW를 중심으로 하는 IT 업체가 자동차 시장을 선도하고 있는 필연적인 현상임
★ 기술 융복합 심화로 인해 기존 산업의 경쟁구도, 생산주체, 기존산업-신산업 간 경계 측면에서 혁신적 변화로 인해 선도국의 여러 완성차 업체들은 부품기업과 IT계열 기업 등과 협력하여 완전 자율주행차 출시를 목표로 활발하게 기술개발을 진행
★ 구글, 애플, 우버, 엔비디아 등 다수 기업들이 독자적으로 혹은 완성차 업체와 기술 제휴를 통해 기술개발을 선도
★ 제어기술의 혁신을 주도할 수 있는 부품업체 및 IT 하드웨어 업체의 역할과 연결성 측면에서 통신업체, IT 소프트웨어 플랫폼, 컨텐츠 업체의 역할이 강조
★ 다양한 소비자 요구 및 기술 진보의 가속화로 산업 및 기술 패러다임이 빠르게 전환됨과 동시에 기술발전 속도, 표준화된 기술의 확산 등의 증가속도가 점차 빨라지고, 소비계층의 니즈 다양화로 인한 공급자-소비자 간 네트워크 강화 촉진
★ 자동차 자체의 인지·판단·제어 기술뿐만 아니라 차량-클라우드-도로 교통인프라가 연결된 초연결 통신 인프라 및 스마트인프라 구축 필요
(글로벌 품질확보) 레벨 4 이상 완전자율주행 상용화 경쟁력 확보를 위해 인지센서, 컴퓨팅플랫폼, 제어기 등 자율주행 핵심부품 및 모듈 등에 대한 글로벌 OEM 대응 상용화 성능 확보 중요
★ Lv.4 자율주행구현 및 상용화를 위해 On-Vehicle, On-Cloud, On-Road, On-Service 등에 대한 안전성·연결성·보완성·가용성 등에 대한 상용화 성능 및 신뢰성 확보 매우 중요
★ 강화되는 글로벌시장 안전기준의 조기 만족을 위해서는 HW/SW의 신뢰성 향상과 기능안전성 대책 마련 필요 - 자동차산업에서 기존에 요구하고 있는 ISO/TS16949와 함께, 기능안전을 명기하는 ISO26262의 관련요건을 만족시키는 설계 및 개발 기술을 적용하여 부품 및 시스템 신뢰성을 국제적 수준으로 향상 - 기존에 KOLAS 등 국제적 수준의 신뢰성 인증 및 평가시설 기반을 갖추고 있는 기관이 개발에 적극 참여하도록 유도함으로써, 신규시설 구축을 최소화 하면서 국제적 수준의 제품 신뢰성 확보 달성 필요
★ 자율주행차 고도화 및 대중화를 위한 성공 핵심요인은 관련 구성기술에 대한 신뢰성 확보와 사용자 수용성 및 인식 전환이 매우 중요한 요소로 대두
- 안전한 자동차를 지향하는 자율주행차가 안전하지 않을 수도 있다는 불안감을 불식시키기 위한 대중의 신뢰 확보가 중요 ※ 테슬라(美) 모델S가 자율주행 충돌(’16) 및 모델X 고속도로 자율주행 사고(’18)
※ 우버(美) 차량이 길을 건너던 보행자 추돌 사고(’18) 등
★ 차량안전무결성수준(ASIL) 중심 안전생명주기를 도입하여 자율주행 시스템의 오작동에 따른 사고를 방지하기 위한 HW 및 SW의 개발·생산·관리 등 산업표준 프로세스 정립·지원이 중요한 요소로 대두
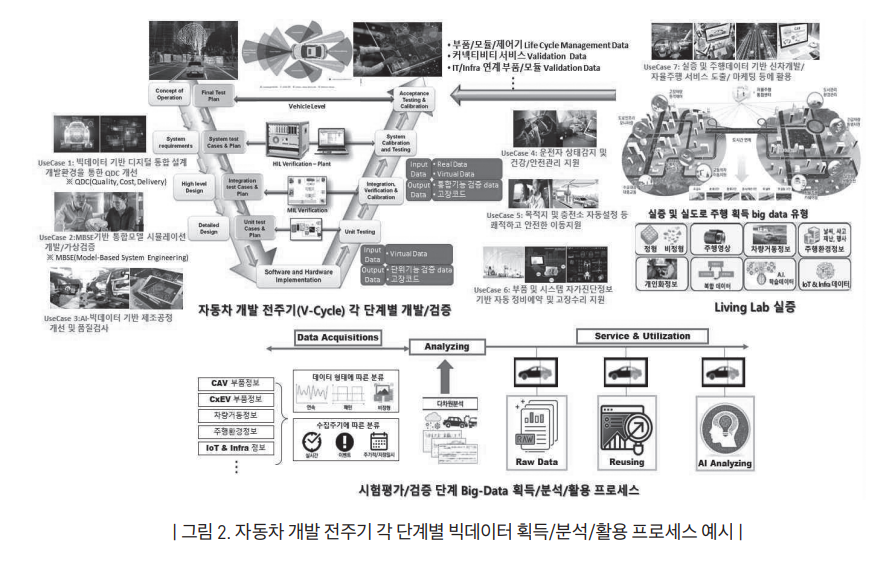
[안전성 확보] 자율주행 융합 기술의 기능 안전성을 달성하기 위해 개념 개발 단계 부터 타당성 확인 단계까지 제품 개발 프로세스에 필요한 기능 안전성 확보 중요
★ 차량의 자율주행은 간단한 오류와 기능 오동작으로 인해 인명 피해, 재산 손실이 발생할 수 있기 때문에 기능안전성의 고려 필수
★ 자율주행차에 대한 운전자 및 사용자의 신뢰성 및 수용성 확보를 위한 redundancy 관점의 safe reliability 설계·검증기술 확보 중요
★ 자동차 단품/시스템의 안전성 국제표준인 ISO 26262에서는 자율주행 기술을 포함한 자동차 전장시스템의 설계·개발 단계에서부터 제품의 가용성과 신뢰성, 유지보수성을 고려하여 설계하도록 가이드 하고 있고, 특히 신뢰성은 HW, SW, 시스템 및 실차 단계에서 철저한 검증이 요구됨
★ 자율주행 융합 기술과 같은 자동차의 전장 기술은 개발 후 기능 안전성을 접목 시키기는 것이 아니라, 개념 개발, 설계·개발 단계부터 안전 목표 수립 및 그 대응 안전 메커니즘을 적용하는 사전 예방적 안전 기술 도입 필요
★ 자율주행 융합기술의 안전성을 확보하기 위해서는 기술이 적용되는 시스템/서브시스템의 신뢰성 목표에 맞춘 신뢰성이 충분히 확보되어야 하며, 설계/제조 결함에 의한 고장에도 강건성을 확보할 수 있는 Fail Safe 및 Fail Operation 설계 검증이 통합적으로 수반되어야 함
★ 실제 도로 환경에서는 다양한 돌발상황이 발생할 수 있고 자율주행 시스템은 이에 대처하여 탑승자를 안전하게 이동시킬 필요가 있음 - 다양한 자율주행 환경에서 발생할 수 있는 돌발요소에 대해 기능안전 관련 기능과 성능을 측정하고 평가할 수 있는 평가 체계 및 프로세스, 평가 장비 등이 필요

[지원 정책동향] 관계부처 합동 미래자동차 산업 발전전략에서 2030년 국가 로드맵으로 ‘미래차 경쟁력 1등 국가’로 도약을 제시함(’19.10)
★ 국내 대·중·소기업이 자율주행차 관련기술을 조기에 선점하고 실용화할 수 있도록 국가 차원의 지원이 요구되며, 정부도 이를 위한 투자계획, 법·제도 마련, 인프라 구축을 준비하고 있음
- VIP, 수석 보좌관 회의에서 “미래차(자율주행자동차 등), 바이오헬스, 시스템 반도체 등 3대 분야 중점육성산업 선정”(’19.4)
- 자율주행자동차 등 13대 혁신성장동력 분야를 포함한 ‘혁신성장동력 시행계획’(’18.5) 및 제 7차 산업기술혁신계획의 5대 전략투자 분야 선정(’19.3)
- 혁신성장을 가속화하기 위해 초연결 지능화, 자율주행자동차, 드론, 스마트시티, 지능형 로봇 등 8대 선도 분야의 선정 및 투자계획 발표(’18.6)
- 정부 국정과제에서 4차 산업혁명, 고부가가치 창출 및 미래형 신산업 발굴 및 육성을 위한 자동차-ICT융합 플랫폼 구축 등 스마트카 개발 및 자율주행자동차 산업 육성을 선정
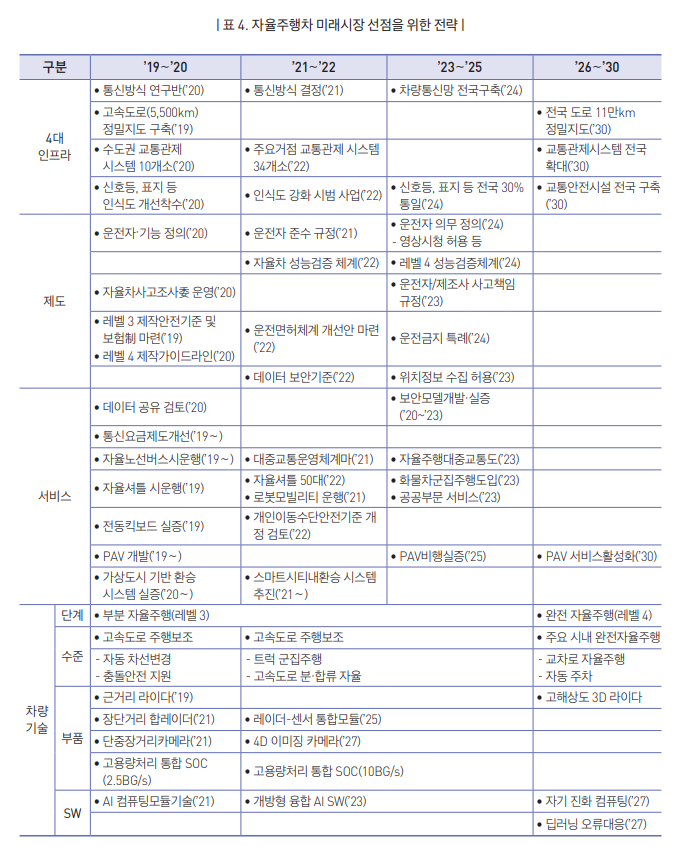
★ 전국 주요 도로의 완전자율주행(레벨 4)의 세계 최초 상용화를 목표(’27) 등 주요 로드맵 구축
- ‘21년 레벨 3 자율차 출시 → ’24년 레벨 4 일부 상용화 → ’27년 레벨 4 전국 상용화
- 이를 위한 전략으로 완전자율주행 법제도·인프라(주요 도로)를 세계에서 가장 먼저 완비(’24)
※ 레벨 3 → 레벨 4 단계적 추진 전략에서 레벨 3+4 동시 기반조성 전략으로 전환
- 자율주행자동차의 미래시장 선점을 위하여 ’27년 전국 주요도로 완전자율주행(레벨 4) 세계최초 상용화를 위하여 법 제도, 인프라(주요도로)를 세계에서 가장 먼저 완비(’24)
※ (인프라 제도) 완전자율주행 통신인프라 등을 전국 주요 도로에 완비(’24), R&D → 상용화의 발전단계별 규제정비·未備규정 마련(’24)
※ (자동차 개발) 완성차社는 차량개발 출시를 최대한 가속화하고, 정부는 차량 출시와 연동하여 부품 국산화 등 산업생태계 지원
2. 자율주행 구성기술 및 특징
(자율주행 구성기술) 자율주행차는 인지(sense), 판단(think), 제어(act) 등의 3단계로 구분되며 하드웨어, 소프트웨어, 네트워크, 플랫폼 등 다양한 요소기술을 활용
★ (인지) 주변 차량, 보행자, 차선, 교통신호 등의 교통시설물, 장애물 등의 주변 상황, 위치, 속도, 바퀴 등의 차량 상태 같은 주행에 필요한 데이터를 수집
- 관련 기술 : 카메라, 레이더, 라이다(LIDAR) 등 센서, 전용 프로세서(GPU), GPS, 고정밀/3D 지도, 검출 및 인식 소프트웨어, 차량 통신(V2X : Vehicle to Everything) 등
★ (판단) 차량에서 수집된 데이터와 지도, 교통량, 도로 상황 등 환경 데이터를 종합하여 최적의 주행경로와 속도를 결정
- 관련 기술 : 인공지능 알고리즘, 빅데이터 분석, 경로 계획 및 생성 알고리즘 등
★ (제어) 엔진, 브레이크 등 자동차의 각 부분을 제어하여 실제로 움직임을 구현
- 관련 기술 : 조향, 가감속, 제동 등 기존 자동차 전자제어 기술
(고수준 자율주행) 레벨 3 이상 고수준 자율주행 구현을 위해서는 현재와 같이 차량 자체에 장착된 센서와 제어기만으로는 한계가 존재하며, AI로 대표되는 소프트웨어와 통신기능을 비롯해서 보안, 항법 등 ICT 기술의 융합이 필수
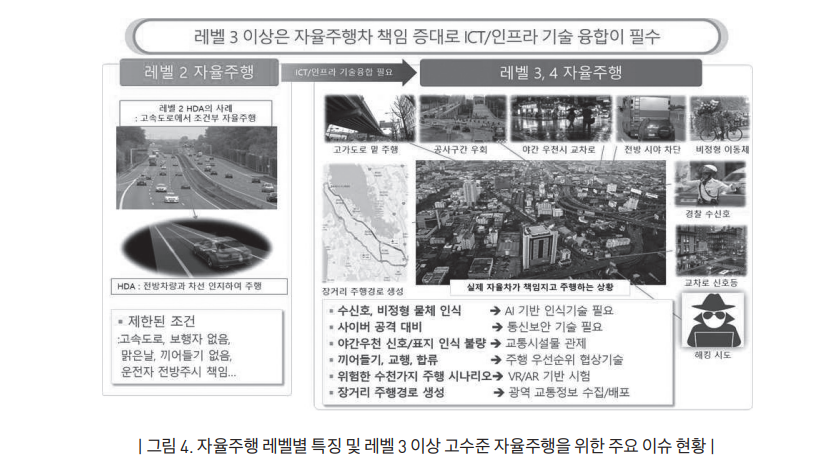
★ 특히 인식기술분야의 경우 자차량 전방 및 주변상황에 존재하는 정형객체 및 비정형객체에 대한 인식 및 검출이 가능해야 하며 경찰수신호인식 및 주행상황에 대한 Scene 해석이 가능해야 함
★ 이를 위해 동적인 장애물의 경우 회피, 정차 또는 돌발상황 등을 판단하기 위해 3차원 위치, 크기, 진행 방향, 장애물의 종류(차량, 보행자, 동물 등)와 주변 장애물의 속성 파악이 가능해야 함
- 차량의 속성의 예 : 경찰차, 구급차, 어린이 통학버스, 트럭, 버스 등
- 보행자의 속성의 예 : 교통경찰, 어린이/성인, 노약자, 도로공사 작업자 등
- 이상행동 물체 속성의 예 : 급감속 및 급출발 반복, 위협적인 행동을 하는 차량 또는 보행자, 고장 차량 등
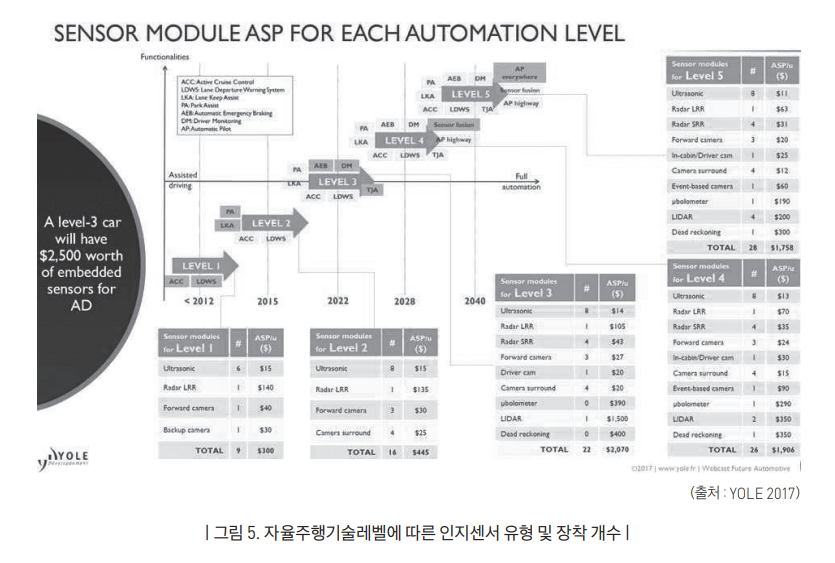
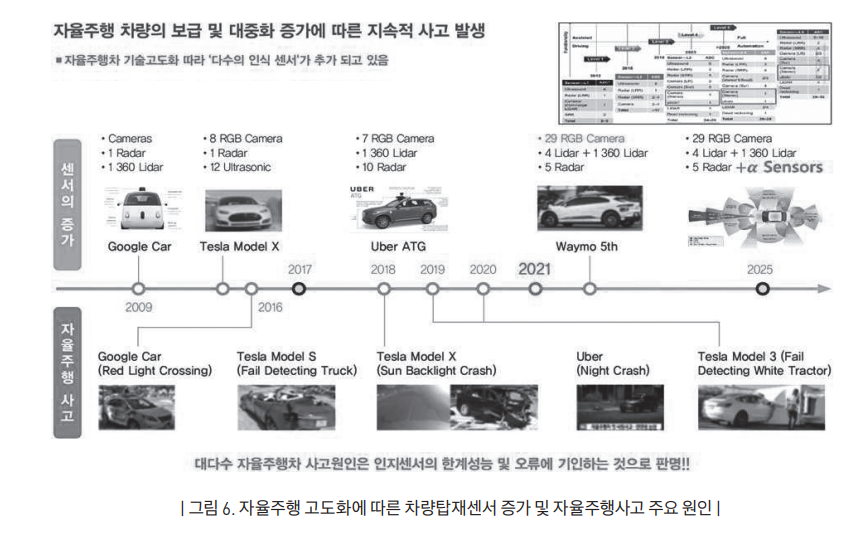
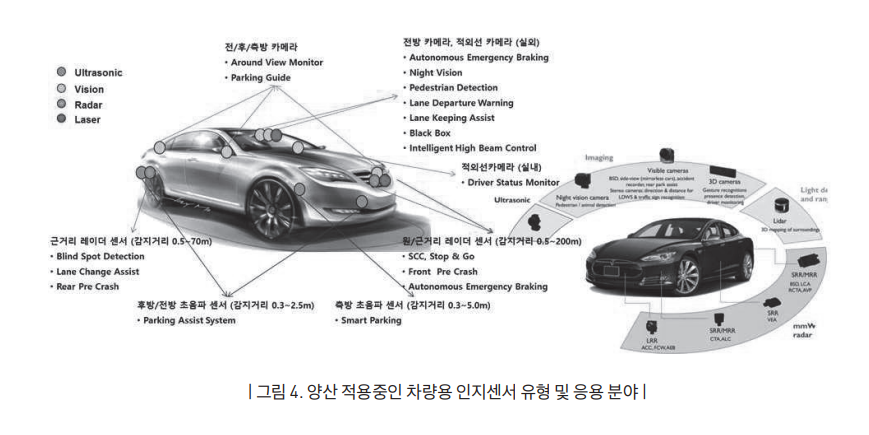
★ 자동차의 주행 안전도 향상 및 자율주행기술 고도화에 따른 주행인지정확도 향상 및 안전도 이중화를 위해 차량에 장착되는 인지센서(카메라/라이다/레이다/초음파 등)의 유형 및 장착개수가 급격히 증가 되고있음
- 레벨 2 수준의 경우 전방인지카메라 3ch/AVM 4ch/Long range Radar 1ch/Ultrasonic 8ch 등 총 16개 이상의 인지 센서가 장착 중임
- 레벨 5 수준의 경우 전방인지카메라 3ch/AVM 4ch/In-cabin & Driver Cam 1ch/Event based Cam 1ch/Long range Radar 1ch/Short range Radar 4ch/Ultrasonic 8ch/ubolometer 1ch/Dead reckoning 1ch 등 총 28개 장착 예상됨
★ 아울러 자율주행차량의 보급 증가 및 실도로 주행이 늘어나면서 자율주행자동차와 관련된 안전사고의 발생수 및 빈도수가 빠르게 늘어나고 있는 상황
3. 자율주행 인지센서 주요 특징
자동차 주행 중 교통정보의 90% 이상이 운전자의 눈을 통해 얻어지지만 운전자가 볼 수 있는 공간은 제한적이며 따라서 사고발생 가능성을 미연에 예방하기 위한 영상인식 기술 및 인공지능 인지예측 기술의 적용범위는 나날이 확대되고 있는 추세임
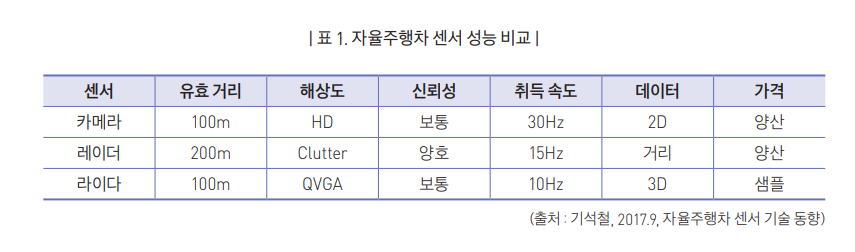
★ 카메라는 이미지 센서를 통해 도로의 차로(차선), 주변 사물 형태 및 색상, 제한속도, 교통표지판, 신호등 정보 등 해상도가 높은 정보 획득을 통해 보다 정확한 도로의 주행환경 정보를 인식하는 기능을 수행
- 카메라는 차선, 신호등, 표지판, 차량, 보행자 및 장애물 등의 다양한 사물을 동시에 인지하는 것이 가능
- 교통 표지판 인식(Traffic Sign Recognition, TSR), 차선 이탈 방지 등의 자율주행 기술 구현을 위해서는 카메라의 사용이 필수
- 레이더나 라이다 센서에 비해 비용 효율적이나, 측정거리나 정밀도가 떨어지고 날씨 및 시간대에 따라 제약을 받을 수 있다는 단점 존재
★ 카메라 센서를 위해 이미지센서, ISP, 고성능DSP, 메모리, 광학 렌즈 등 필요하며, 카메라 센서 성능의 고도화와 더불어 Fallback 상황에서 운전자의 즉각적인 반응이 가능하도록 하는 운전자 모니터링 카메라 관련 기술이 개발되는 추세
- ADAS 기능이 의무 장착되며 후방 감시 카메라, 다기능 전방카메라, 안전 주차를 보조하는 어라운드 뷰 카메라, 스테레오 카메라, 야간 감시 카메라, 운전자 모니터링 카메라 등 다양한 종류와 기능을 가진 카메라의 개발 및 장착 진행
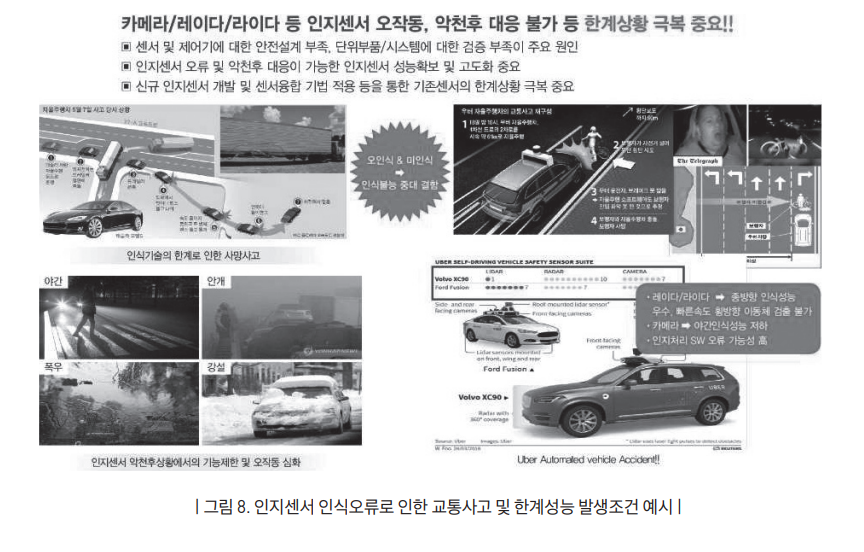
★ 자율주행기술 고도화에따라 단일 센서의 기능을 넘어서서 돌발상황 대응, 악천후 대응, ODD(Operation Design Domain)상의 제약조건 극복을 위해 이종센서간 데이터융합 및 인공지능기술 접목 등 다양한 연구개발 등이 시도되고 있음
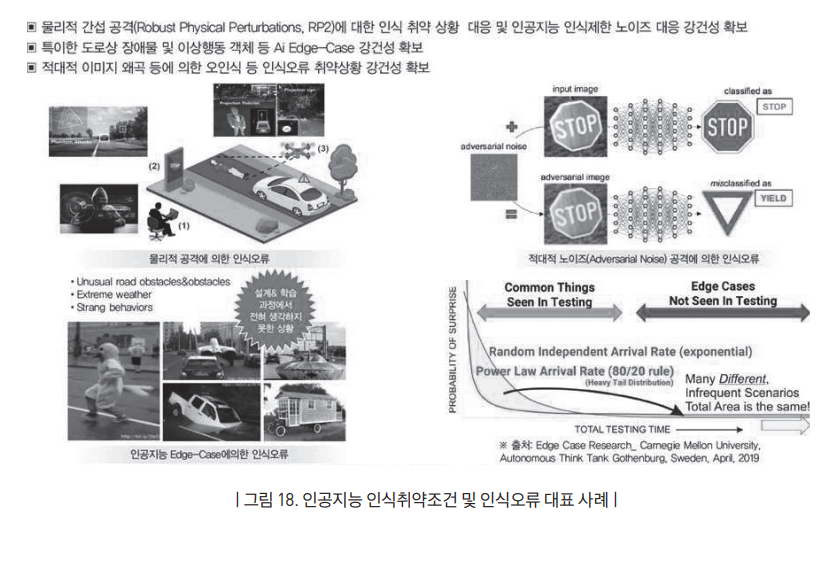
★ 특히 주변환경을 인식하는 센서의 주변환경 변화에 따른 미인식 및 오인식등 인식오류 및 악천후 등 인식한계조건에 따른 다수의 자율주행 사고 발생
- 2018년 3월 18일(일) 밤 10시, 미국 Arizona에서 Uber사 자율주행 차량이 횡단보도 54m 이상 떨어진 위치에서 자전거를 끌고 무단 횡단하던 49세 노숙자 여성을 치어 사망
- 2018년 3월, 테슬라 차량이 자율주행 모드로 주행 중 중앙 분리대를 충돌한 후 화재 전소
- 2018년 4월, 테슬라 사고는 오전 역광이 내리쬐는 상황에서 차량이 중앙 분리대를 들이받는 사고
★ 이러한 자율주행자동차의 사고원인을 파악해본 결과 카메라/레이다/라이다와 같은 인지센서가 갖는 한계검출성능(야간, 역광, 강우, 강설, 안개 등 악천후 강건성 미비), 인지오류 등이 대다수 원인으로 규명되고 있는 실정
★ 따라서 기존 인지센서가 갖고있는 인식오류 최소화 및 한계성능 극복을 위해 딥러닝 기반 다양한 인공지능 인식기술의 개발이 가속화 되고 있으며 이러한 인공지능 인식기술의 인식정확도 향상 및 성능확보를 위해서는 다양한 검출대상, 주행시나리오, 환경조건 등을 반영한 실도로 주행기반 원천데이터 및 학습용데이터의 확보와 공개가 필연적인 상황임
- 카메라는 전통적인 객체 검출 방식뿐만 아니라 딥러닝 기반 통합 다중 스케일기반 학습을 통해서 인식 예측 성능 및 신뢰도가 급격히 발전 중
- 혹한의 날씨에 대한 한계 및 조명 조건에 대한 제한을 해결할 수 있어야 하며, 인공지능 기반 높은 신뢰성과 다양한 인식 및 예측 기능이 중요
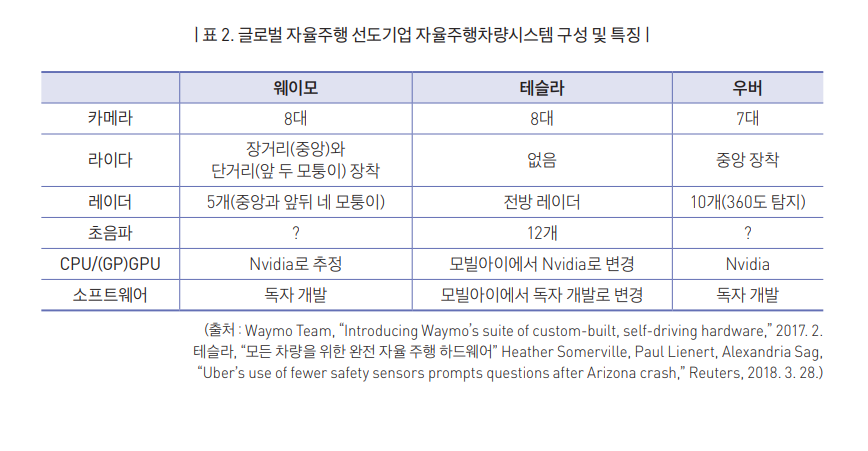
★ 이를 위해 해외의 경우 웨이모(Waymo)나 우버(Uber)의 경우 독자적으로 카메라와 라이다가 장착된 차량을 수십~수백여 대를 운행하면서 고해상도 데이터를 수집하고 있으며, 테슬라의 경우 오토파일럿(Autopilot), 모빌아이의 경우 REM(Road Expereince Management)라는 프로그램을 이용하여 자율주행차량을 운행하는 운전자들로부터 대규모 주행데이터를 수집 및 가공하여 인공지능 인식성능을 빠른 속도록 고도화 중임
★ 국내 자율주행차량용 인공지능 영상인식 알고리즘 개발시 학습용 데이터는 대부분 해외 공개 데이터를 활용하여 이뤄지고 있는바, 국내 도로환경 및 주행조건 등을 제대로 반영하지 못하고 있으며 그로 인해 인공지능기반 인식기술의 성능이 크게 개선되지 못 하고 있는 실정임
★ 따라서 국내 자율주행자동차 부품/시스템산업, 연관산업 및 서비스산업 등에 적용하기 위해 국내 상황에 맞는 도로구조 및 형태, 환경조건, 주행조건 등을 반영한 대규모 원시데이터, 학습용데이터의 구축과 공개가 또 하나의 매우 중요한 요소임
4. 자율주행 인지센서 개발 동향
이미지센서(카메라) 개발동향
★ 카메라는 충돌방지(AEB), 차선유지(LKA), 주차보조 등 레벨 2 이상의 다양한 환경에서 활용되는 필수장치, 일부 국가 장착 의무화로 비중 증가
- 주차 시 후방 카메라는 이미 친숙, 차량 주변 360도를 살필 수 있는 서라운드뷰 기능도 고급차량에서 일반차량으로 확대 중
- 한국은 2014년 9월부터 판매되는 대형트럭과 어린이 통학 차량에 후방카메라 장착 의무화, 미국은 2016년 대형트럭에 이어 2018년부터 전 차종 의무화
★ 초고화질 광각 카메라 개발 경쟁 중이며, 자율주행기술 발전에 따라 사물 식별이나 거리탐지가 가능한 소프트웨어적 이미지 처리기술이 강조
- CMOS기반의 이미지 센싱 칩이 기초가 되고 있으며 이 시장은 ON Semiconductor(Aptina 인수)가 46% 장악, 옴니비전, 파나소닉, 소니 등이 시장 세분화
- 모듈의 경우 모빌아이가 뛰어난 이미지 프로세싱 능력으로 시장의 80%를 과점 중이며, 시스템은 보쉬, 컨티넨탈과 같은 친숙한 자동차 부품사가 제조
- 삼성은 반도체 생산 역량을 바탕으로 이미지 프로세싱 칩과 CMOS 센서 개발경쟁에 진입

라이다(LiDAR : Light Detection and Ranging) 개발동향
★ 라이다는 높은 정밀도(분해능)로 사물의 거리와 형상 인식이 가능해 자율주행차를 상징하는 센서로 인식되어 있으나 몇 가지 한계점 극복 필요
- 고출력 레이저를 통해 사물의 거리, 속도, 온도, 분포 등 다양한 물리적 특성 측정이 가능해 대기환경 연구에 사용되어 오다가 자율주행차에 적용
- 차량 주변 360도 전 방위를 정밀하게 측정할 수 있는 센서로 매우 유용하나, 높은 가격과 날씨에 따른 취약점(우천, 폭설 시 난반사)이 있어 실용화 한계
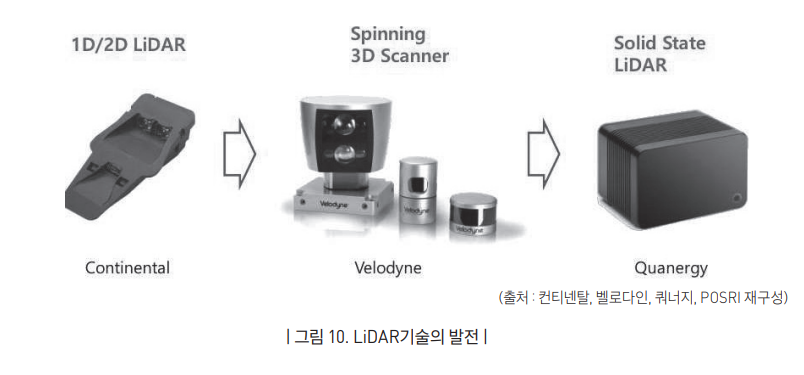
- 기존 360도 회전식 스캔장비는 진동 등 외부환경에도 정밀도를 유지하기 위해 제조비용이 높았으나 최근에는 고정형(Solid State) 라이다 개발로 돌파구 마련
- 인지각도는 줄었으나, 구조의 단순화, 부품소형화로 가격경쟁력을 확보했으며, 여타 자동차 부품의 패키지와 비슷해 설계 및 장착이 용이
★ 라이다는 빛을 발산하는 이미터와 수신하는 리시버, 스캔한 이미지를 처리하는 프로세서로 구성, 벨로다인을 비롯한 여러 업체가 시장 경쟁 중
- 25개 기업과 자율주행차 프로그램을 진행 중인 벨로다인이 독보적 위치를 차지하고 있으며, 같은 실리콘밸리의 신생기업 쿼너지가 고정형 라이다로 추격
- 이 외에도 이노비즈 테크놀로지, 에어로스타, 레다테크, 이베오 오토모티브 시스템즈 등도 시장에 뛰어들었으며, 이로 인해 현재 수만 달러를 호가하는 라이다의 가격이 수년 내 대당 250달러까지 하락할 것으로 전망

레이다 개발동향
★ 카메라혹은라이다의단점을보완해주는수단으로, 긴급제동(AEB), 스마트크루즈컨트롤(SCC), 사각지대경보시스템(BSD)에 필수
- 레이다는 물체의 탐지와 거리측정이 가능한 센서로 라이다와는 사실상 경쟁부품 관계, 테슬라와 같은 기업은 고가의 라이다를 배제하고 카메라와 레이다만으로 자율주행기술을 완성하려는 전략
- 레이다는 정밀도(분해능)는 떨어지는 데 반해, 빛이나 기후영향을 거의 받지 않아 카메라와 라이다의 단점을 보완하며 감도가 우수
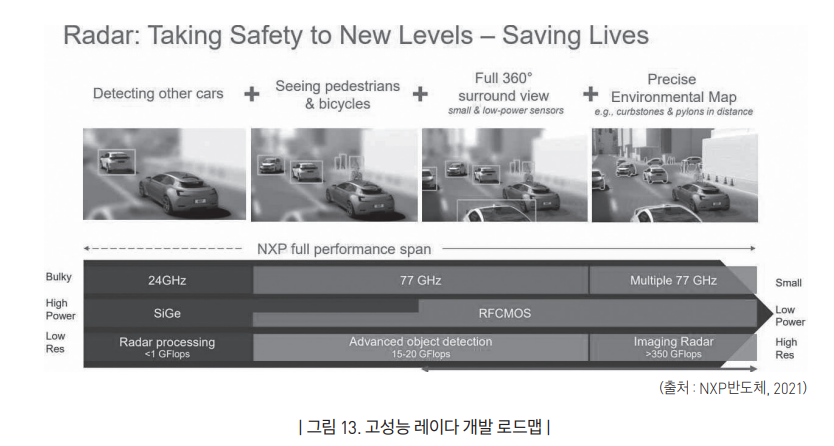
★ 레이다는 점차 크기와 무게를 줄인 컴팩트형 부품으로 출시되고 있으며, 측정각이나 측정거리를 확대하는 방향으로 기술 개발 전개
- 2000년 출시한 보쉬의 1세대 레이다는 무게 600g, 측정거리는 150m였으나, 현재 4세대는 무게는 300g에 불과하고 측정거리가 250m에 이름(LRR, Long Range Radar)
- 또한 측정각은 8도에서 현재는 40도로 크게 확대되어 빠른 성능향상을 이루고 있으며, 단거리(SRR, Short Range Radar)/장거리(LRR, Long Range Radar) 측정 전환이 가능한 멀티레이다도 개발
- 레이다 칩은 인피니언과 NXP가 각 40%의 시장점유율로 시장을 과점하고 있으며, 모듈은 컨티넨탈, 보쉬, 발레오, 헬라 등 자동차 부품사가 생산
자율주행 인식/판단 기술수준 현황
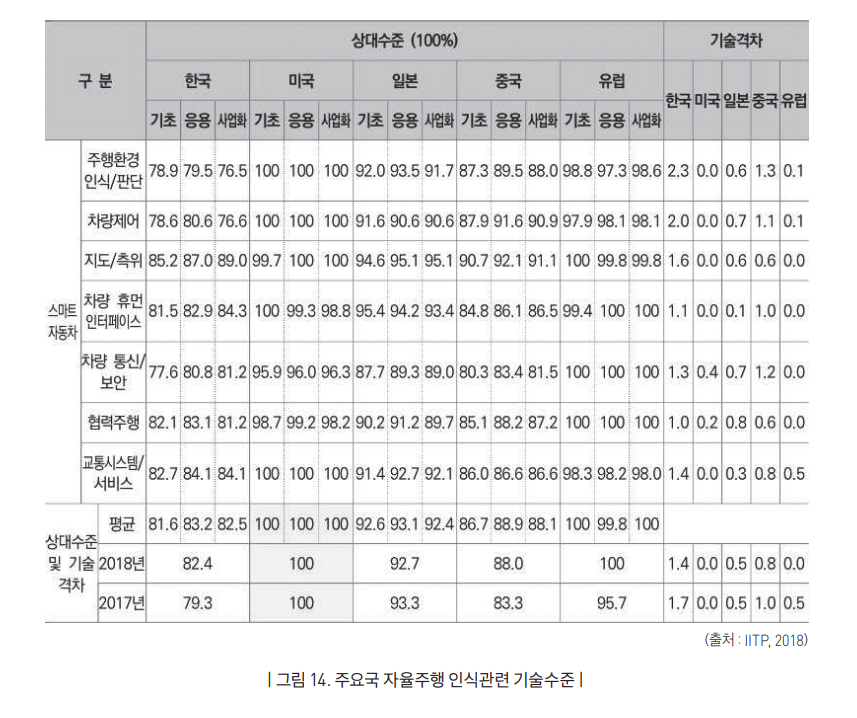
★ 2019년에 발행된 IITP의 “2018 ICT 기술수준조사 보고서”는 자율주행차 주변환경 인식/판단기술 기술수준 제시
- 한국의 기술수준은 79.5%로 추격그룹에 해당
- 기초/응용/사업화 전 단계에서 미국, 유럽, 일본, 중국보다 기술수준이 낮은 것으로 평가되나, 정부의 제도개선과 R&D 투자를 통해 기술격차는 축소되고 있는 것으로 분석
국외 시장 규모
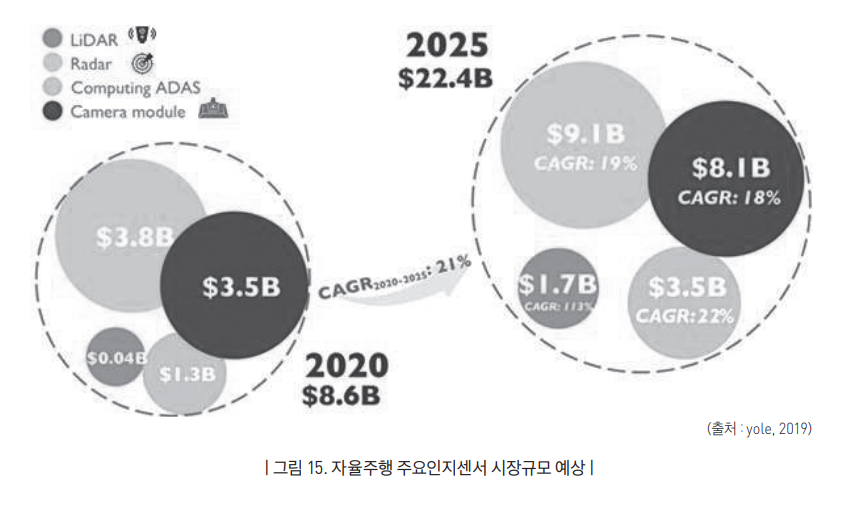
★ 글로벌 자율주행 센서 시장 규모는 2020년 약 240억 달러에서 2025년 400억 달러 규모로 성장할 것으로 예상됨 (출처 : Insight Partners). 자율주행 센서에서 카메라 센서가 핵심 센서로 평가되며 향후에도 자율주행 센서 시장에서 가장 큰 규모를 차지할 것으로 예측됨
★ 글로벌 자동차 카메라 모듈 시장은 2020년 약 170억 달러로 평가에서 2025년까지 289억 달러에 이를 것으로 예상되며 2021~2025년 동안 연 평균 11%로 성장할 것으로 예상됨(출처 : Yole Development)
5. 맺음말
Lv.4 이상 고도자율주행 상용화 및 보급활성화를 위해 기존인지센서의 한계성능 극복 및 성능고도화 관련 상용화 기술개발 중요
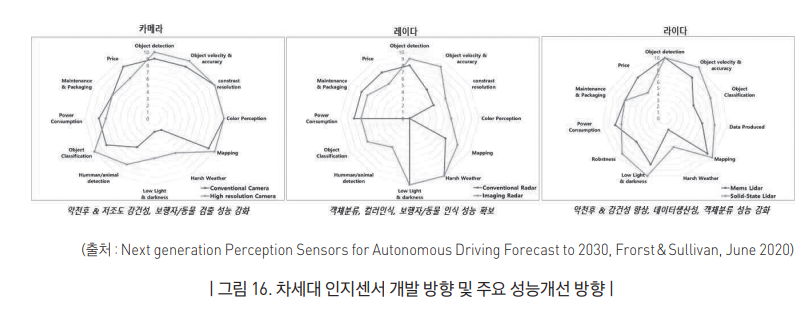
★ (카메라) 기존 영상센서대비 악천후&저저도 강건성 확보, 보행자&동물 검출성능 개선, 객체분류성능 향상, 8M급 이상 고해상도화를 위한 상용화 기술개발 등을 집중 육성 필요
★ (레이다) 객체인식 및 분류성능 확보, 보행자&동물 검출성능 확보가 가능한 이미징레이다 기술개발에 집중
★ (라이다) 데이터생산성 향상, 악천후&강건성 확보, 객체분류 성능 강화, 소형경량화 및 가격경쟁력 확보를 위한 상용화 기술개발 중요
ODD 등 주행환경 및 주행조건에 제한을 받지않는 Lv.5수준의 완전자율주행 및 4-free* 구현을 위한 초고난도 인지예측센서 원천 및 핵심기술 확보를 위한 산·학·연 협력 기술개발이 필요
* 4-free: Accident Free/ Barrier Free/ Congestion Free/ Delay Free
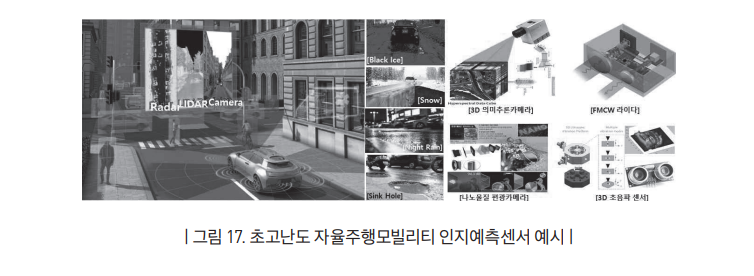
★ 블랙아이스, 수막현상에 의해 보이지 않는 차선이나 포트홀 등 눈에 보이지 않는 비가시 위협객체(Non-visable object) 검출이 가능한 새로운 형태의 인지센서 기술 확보가 매우 시급하고 중요함
- 가시영역 및 SWIR(Short Wavelength Infrared) 영역대를 동시 수용을 통한 검출대상체의 표면재질 및 상태 파악 가능한 3D-의미추론카메라 원천 및 핵심기술
- 저전력 단파 광대역 적외선 레이저(low-power broadband shortwave infrared(SWIR) laser) 부품 원천 및 핵심기술
- 나노복합재(나노물질) 기반 μm 수준초박막평면렌즈 소재, 성형 등 원천 및 핵심기술
- 기존 상용카메라 대비 10,000배 이상의 다이나믹레인지(WDR) 확보가 가능한 생체모방형 편광카메라 소재 부품 원천 핵심 기술
차량탑재형 인공지능 인식기술 활성화에 따른 인공지능 인식취약성능 극복 중요
★ 외부공격, 고의해킹, Edge-case등 차량탑재용 인공지능 인식취약점 분석을 통한 인식오류 극복기술 확보 매우 중요
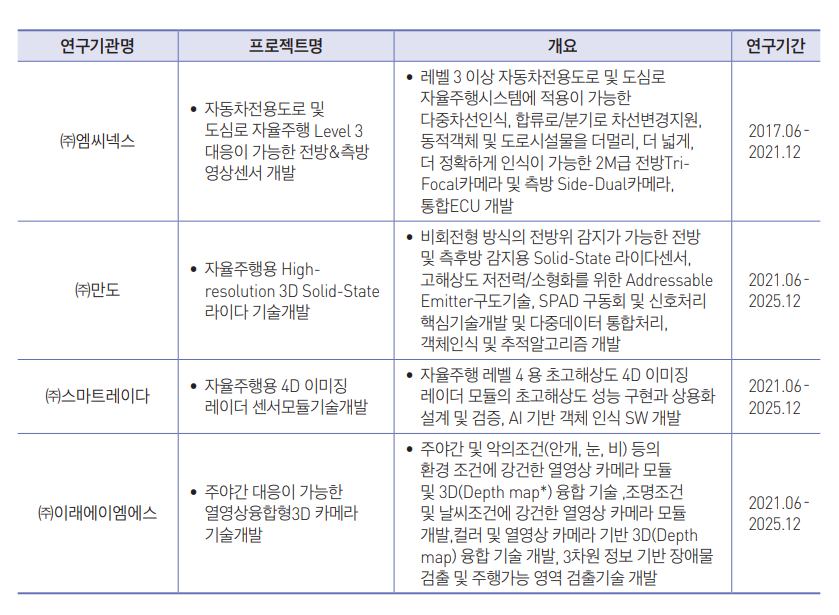
[국내외 주요 기술개발 현황]
출처 : keit pd 이슈리포트
'사회경제' 카테고리의 다른 글
| 임베디드 인공지능 SW 기술맵 동향 (0) | 2023.04.05 |
|---|---|
| 기술기반의약품(TBM)의 기술개발 동향과 미래가치 (0) | 2023.04.05 |
| 리튬-황 차세대 이차전지의 기술 동향 및 전망 (0) | 2023.03.22 |
| 수소 파이프라인 강재 기술개발 동향 (0) | 2023.03.21 |
| 유연물 핸들링 로봇 시스템을 위한 인식, 파지, 조작 기술 (0) | 2023.03.21 |




댓글